


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
METHOD OF DESIGN AUTOMATION OF THE MULTICOPTER PLATFORM AND ITS INTEGRATION WITH OTHER COMPONENTS

Первое упоминание беспилотных летательных аппаратов (БПЛА) с тремя и более несущими винтами – мультикоптеров датируется 1920-ми гг. Отсутствие совершенных систем дистанционного управления значительно затрудняло развитие конструкций мультикоптеров. С развитием систем дистанционного управления стали активно развиваться и конструкции мультикоптеров. Появились гражданские модели и множество разновидностей мультикоптеров по размерам, назначению и конфигурации расположения двигателей. Для российского рынка мультикоптеров 2015 г. стал отправной точкой быстрого роста. Причины этого заключаются в том, что средняя цена приобретённого мультикоптера снизилась до 10 тыс. руб. Мультикоптеры стали заполнять гражданский рынок. В свободной продаже появились дешёвые и легкие в управлении мультикоптеры. Спрос вызвал потребность в быстром проектировании новых моделей мультикоптеров. Рынок быстро меняется, а проектирование новых моделей мультикоптеров требует определённых трудозатрат и времени. Производственные компании, которые могут своевременно подстраиваться под потребности рынка, всегда будут лидерами в данной отрасли. Сокращению времени проектирования новых моделей мультикоптеров способствует автоматизация процессов проектирования. Способ проектирования, при котором часть или все процессы проектирования осуществляются путем взаимодействия пользователя и электронно-вычислительной машины, называется автоматизированным.
Предметами автоматизации проектирования являются: формализация проектных процедур, структурирование и разделение на типы процессов проектирования, методы и алгоритмы решения проектных задач, а также способ построения технических средств, языков, программ, баз данных и вопросов их объединения в единую проектную систему.
Целью данной работы является разработка метода автоматизированной системы проектирования, что ведёт к увеличению качества выпускаемой продукции, снижению материальных затрат на проектирование, сокращению сроков проектирования и, как следствие, уменьшению числа инженерно-технических работников (ИТР), занимающихся проектированием, а также повышению производительности труда [1].
Вопрос автоматизации проектирования в сфере летательных аппаратов рассмотрен в работе В.В. Володина «Автоматизация проектирования летательных аппаратов». В работе рассмотрены теоретические базисы разработки систем автоматизированного проектирования (САПР). Предоставлены методические материалы по созданию различных видов программных обеспечений автоматизации проектирования, в частности таких, которым до сих пор в технической литературе уделялось малое количество внимания. Представлены инструкции к организации работ по созданию САПР и характеристики САПР различных летательных аппаратов [2]. Вопрос автоматизации проектирования мультикоптеров в научном мире является неисследованным.
Широко раскрыта тема проектирования БПЛА в работе В.М. Ильюшко «Беспилотные летательные аппараты: Методики приближенных расчетов основных параметров и характеристик», в которой изложены проектировочные методы определения основных характеристик беспилотных летательных аппаратов, методы сравнительного анализа конструкций и оптимизации конструктивных, энергетических, баллистических и стохастических параметров. В качестве основного критерия сравнительного анализа и оптимизации принимаются экономические затраты на выполнение целевой задачи [3]. Подавляющая часть работ направлена на конструирование БПЛА самолётного типа. Также различным аспектам проектирования и конструирования БПЛА посвящены работы А.Г. Гребеникова по теме: «Общие виды и характеристики беспилотных летательных аппаратов» [4], И.С. Голубева по теме: «Беспилотные летательные аппараты. Основы устройства и функционирования» [5].
Сегодня в глобальной сети Интернет индексируется несколько различных калькуляторов, предназначенных для расчёта различных характеристик мультикоптерного летательного аппарата ЛА в режиме онлайн. Подобные калькуляторы используются в большей степени при сборке и эксплуатации мультикоптерного ЛА, нежели при его проектировании. Аналоги программных обеспечений к разрабатываемой системе автоматизированного проектирования на данный момент не были обнаружены.
Материалы и методы исследования
Анализ предметной области является первым этапом в разработке системы автоматизированного проектирования мультикоптерных платформ. По своему назначению мультикоптерные ЛА можно разделить на военные и гражданские. В рамках разработки автоматизированной системы проектирования акцент сделан на гражданские мультикоптерные ЛА. Которые по признаку собственности могут быть частными, их используют для любительских целей, а также государственными или коммерческими мультикоптерными ЛА, которые имеют обширную область применения: аэрофотосъёмка и транспорт. Классификация БПЛА по назначению представлена на рис. 1.
Мультикоптерная платформа является аналогом фюзеляжа, к которому прикрепляются моторы, регуляторы частот вращения, система управления полётом, приемник и передатчик, а также другие части мультикоптерного ЛА. В зависимости от цели использования мультикоптерные ЛА имеют различную схему МКП.
Для корректного функционирования мультикоптерного ЛА необходим следующий набор обязательных (а и б) компонентов:
а) мультикоптерная платформа, ее составляющие:
– отсек аккумулятора/отсек регуляторов частот вращения;
– площадка для крепления системы управления полётом;
– площадка крепления приемника;
– силовые лучи с посадочными местами для моторов;
– силовой каркас.
б) компоненты полёта:
– силовая установка (минимально 3 мотора);
– контроллер полёта или процессор;
– регуляторы частот вращения;
– аккумуляторная батарея;
– приёмник и передатчик;
– пропеллеры или лопасти.
в) дополнительные компоненты (не являются обязательными):
– фото-видеокамера;
– устройство сброса грузов/лазерный дальномер/телеметрия;
– демпферные шасси;
– LED индикатор;
– защитные кожухи лопастей;
– платформа для груза.
На рис. 2 предложена классификация мультикоптерных ЛА по типу шасси, расположению и количеству моторов, типу моторов и размещению моторов.
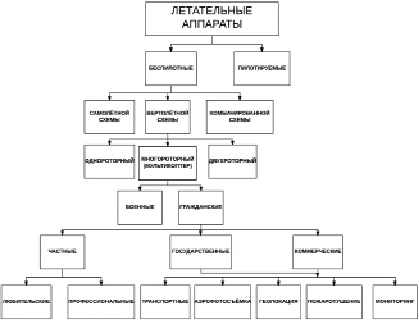
Рис. 1. Классификация БПЛА
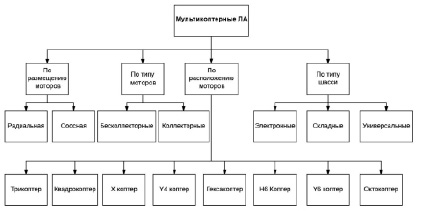
Рис. 2. Классификация мультикоптерных ЛА

Рис. 3. Вариации расположения моторов на мультикоптерной платформе
После выбора эксплуатационной цели мультикоптерного ЛА производят выбор схемы МКП, последняя в свою очередь влияет на цену комплектующих компонентов для сборки. Для некоторых целей количество моторов может быть излишним или же недостаточным, что в свою очередь оказывает влияние на летно-технические характеристики и способность мультикоптерного ЛА выполнять заданные эксплуатационные цели. Моторы в комплексе мультикоптерного ЛА составляют до 40 % его стоимости. Следовательно, увеличение количества моторов увеличивает стоимость мультикоптерного ЛА. Максимальное влияние на конструкцию мультикоптерной платформы оказывает расположение моторов и их количество, так как изменяется количество лучей и посадочных мест для моторов, что влияет на прочностные свойства и управляемость мультикоптерной платформы в полёте. Кроме этого аддитация каждого нового мотора увеличивает энергопотребление и нагрев контроллера полёта, что приводит к необходимости использования аккумуляторных батарей повышенной емкости. Для корректного функционирования бортового оборудования и его естественного охлаждения необходимо расширить внутренний объём МКП. Классификация мультикоптеров по количеству моторов представлена на рис. 3.
Трикоптеры – мультикоптеры, которые имеют три несущих винта, расположенных на раме, имеющей форму, напоминающую латинскую букву «Y». Мультикоптеры данного типа являются самыми доступными, поскольку для их постройки требуется всего 3 мотора и 3 регулятора скорости. Минусы трикоптеров: неустойчивость в полете, небольшой относительный вес полезной нагрузки и ненадежность: в случае отказа одного мотора трикоптер теряет полётную устойчивость. Данный фактор не позволяет использовать трикоптеры для транспортировки дорогостоящего оборудования.
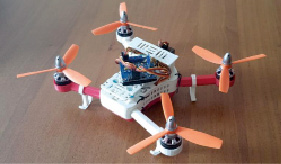
Рис. 4. 3D модель мультикоптерной платформы после печати на 3D принтере MakerBot
Квадрокоптеры – мультикоптеры, имеющие четыре несущих винта. При аналогичной (по отношению к трикоптерам) взлётной массе они способны поднять в воздух груз на 30 % более тяжелый (за счет дополнительного мотора). При эксплуатации квадрокоптеры устойчивы (по сравнению с трикоптерами) и способны выполнять свои функции дольше за счет емкой батареи и за счет более экономичного режима работы моторов. Квадрокоптеры, как и трикоптеры, теряют устойчивость при отказе одного мотора, поэтому для ответственных целей – полетов с цифровой камерой – они малопригодны. Эти примеры показывают зависимость схемы мультикоптерной платформы с возможностью её использования для определённых целей.
Гексакоптеры – системы из шести построенных в одной плоскости моторов, как правило расположенных в форме буквы «Ж» или «Н». Мультикоптеры данного типа обладают всеми положительными чертами квадрокоптеров, а также имеют больший вес полезной нагрузки и живучесть при поломке одного мотора.
Октокоптерами называют системы с восемью и более моторами. Они обладают всеми положительными характеристиками гексакоптеров, а также дают 100 %-ную гарантию от потери устойчивости при отказе одного мотора.
Любой тип мультикоптеров может быть построен как по соосной, так и по радиальной схеме. Два соседних мотора располагаются один над другим (один мотор тянет вверх, другой толкает вверх), если это соосная схема, и в случае радиальной схемы все моторы в одной плоскости.
Результаты исследования и их обсуждение
Различные мультикоптерные платформы имеют разные методики расчёта. Метод автоматизированного проектирования мультикоптерной платформы, предложенный в данной работе, включает в себя реализацию информационного, прикладного программного и алгоритмического обеспечения. Программное обеспечение позволяет реализовать некоторые этапы проектирования мультикоптерной платформы, такие как:
– расчет конструктивно-геометрических характеристик мультикоптерной платформы;
– расчет массовых характеристик мультикоптерной платформы;
– расчет режимных характеристик мультикоптерной платформы;
– расчет аэродинамических характеристик мультикоптерной платформы;
– отчёт о работе программы автоматизированного проектирования с возможностью экспорта на 3D печать и предварительного просмотра модели для необходимых корректировок.
Для построения 3D модели необходимо ввести входные данные, определённые техническим заданием на проектирование. После расчёта необходимых характеристик (конструктивно–геометрических, массовых, режимных, аэродинамических) разработанная САПР в автоматизированном режиме производит построение 3D–модели, проектируемой мультикоптерной платформы в системе трехмерного моделирования SolidWorks для дальнейшего проведения физических опытов воздействия воздушной среды на мультикоптерную платформу в аэродинамической трубе (рис. 4).
Заключение
В рамках данного исследования проведен анализ в области проектирования и конструирования БПЛА мультикоптерного типа, который выявил:
– отсутствие формализованного процесса проектирования и конструирования мультикоптерных ЛА;
– существующее ПО в настоящее время не позволяет вести процесс проектирования и конструирования в условиях сжатых временных периодов;
– актуальной задачей остается разработка методов и алгоритмов автоматизированного проектирования МКП, отличающихся от имеющихся четким определением объекта проектирования и исключением функциональной избыточности.
На основе метода разработан алгоритм и программное средство AutoCopter 1.0, реализуемое в программной среде Visual Studio методом объектно-ориентированного программирования на языке высокого уровня C#. Данное программное средство генерирует на основе исходных данных модели, адаптированные для 3D печати из ABS пластика.
Библиографическая ссылка
Кондров Я.В., Припадчев А.Д., Горбунов А.А. МЕТОД АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ МУЛЬТИКОПТЕРНОЙ ПЛАТФОРМЫ И ЕЕ ИНТЕГРАЦИЯ С ДРУГИМИ КОМПОНЕНТАМИ // Современные наукоемкие технологии. 2018. № 11-1. С. 37-42;URL: https://top-technologies.ru/en/article/view?id=37234 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.37234