


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
Development of the Duomatic 09-32 virtual simulator

Последнее время разработка виртуальных тренажеров, является актуальной деятельностью и перспективным направлением в сфере IT технологий. Присутствует огромное разнообразие средств обучения, таких как электронные учебники, компьютерные тренажеры, виртуальные лаборатории и системы компьютерного тестирования. Преимущества данных исследований и разработки подтверждены большинством авторитетных мнений разработчиков и руководителей многих компаний.
Под автоматизированной тренажёрно-обучающей системой подразумевается специализированный АПК (аппаратно-программный комплекс) способствующий увеличению навыков и умений специалистов и учеников [1].
Тренажёрные технологии являются безусловно сложными комплексами, системами симуляции, а также моделирования, технологическими программами и физическими моделями, предназначенными, чтобы подготовить своего рода личность к принятию объективных и своевременных, быстрых и верных решений [2].
Области, в которых могут применяться данные тренажёрные комплексы, постоянно расширяются, увеличивают круг влияния и сферы деятельности. Данные технологии тренажёров появились и применяются там, где реализация на реальных людях и т.д. может повлечь за собой пагубные последствия и нести опасность для окружающих людей.
Деятельность оператора Duomatic 09-32, как один из видов операторской деятельности, изучаемой инженерами, прежде всего, обладает такими особенностями, как ограниченность времени для принятия решения, высокая цена ошибки, высокая вероятность возникновения непредвиденных ситуаций. В связи с этими особенностями деятельности, а также учитывая сложные ситуации на железнодорожных путях и ответственность инженера не только за себя, но и за других участников движения, управление составом рассматривают как сложный процесс, требующий эмоционального напряжения, мобилизованности, способности постоянно анализировать окружающую обстановку и прогнозировать развитие ситуации. Сопротивляемость влиянию отрицательных факторов управления железнодорожным составом различна и зависит от индивидуальных особенностей машиниста, его психологических качеств и практических навыков [1].
В каждой профессии можно определить наиболее важные процессы, которые определяют качество и безопасность работы. Для машиниста – это восприятие железнодорожной ситуации в многообразии ее проявлений (составы, люди на путях, железнодорожные знаки, светофоры и др.), анализ и переработка поступающей информации, принятие решения и своевременное выполнение действия по управлению составом Duomatic 09-32. Современная железная дорога предъявляет очень высокие требования к навыкам оператора-машиниста. При современных скоростях, развиваемых составами, и опасности передвижения, а также работ по рихтовке, выпрямлению, и подъёмке железнодорожных рельсов, машинист-оператор должен уметь воспринимать большие объемы информации о характере и режиме движения всех участников, о состоянии железной дороги, окружающей среды, средствах регулирования, о состоянии узлов поездного состава. Кроме того, анализировать информацию и принимать необходимое решение, как уже отмечалось, в ограниченные промежутки времени. Часто именно дефицит времени является причиной железнодорожно-транспортного происшествия.
Целью данной научно-исследовательской работы является повышение качества уровня навыков движения, а также выпрямительно-подъёмно-рихтовочных операций оператора-машиниста специального поездного состава Duomatic 09-32.
Материалы и методы исследования
Для достижения данных целей изучена предметная область, разработана концепция, на основе которой разработана и спроектирована виртуальная модель тренажёра Duomatic 09-32.
Современные тренажёры основаны на принципах развития практических навыков моделирования, а также благодаря Unity 3D, C# и 3ds MAX. Реализация данного подхода стала целесообразной и рентабельной благодаря виртуальному моделированию, сенсорным мониторам, заменяющим натурные элементы ручки акселератора, а также тормозов. На фундаменте данных методик и технологий базируются тренажёрные комплексы, которые позволяют погрузиться в действия с невероятной реалистичностью и высочайшей детальностью в режиме реального времени.
Модель можно использовать как для собственных разработок, так и в дальнейшем сторонними разработчиками.
Процесс разработки и проектировки предполагает под собой построение MS Visio диаграмм для понимания архитектуры, непосредственное кодирование и отладку программного кода. В качестве инструментов выбран мощный кроссплатформенный движок Unity3D. Данный движок является самодостаточным, но для больших возможностей разработки используется интегрированная среда разработки Visual Studio 2017, которая позволяет управлять потоком программы Unity3D.
Язык С# предоставляет возможность программисту разрабатывать виртуальные тренажёры и является кроссплатформенным. Кроссплатформенность – возможность использования одного и того же написанного кода программы для использования на разных источниках, таких как компьютер, смартфон или сервер.
Unity занимает 45 % рынка независимых движков, что в три раза больше, чем у ближайшего конкурента [3–5].
Результаты исследования и их обсуждение
Выправочно-рихтовочно-подбивочная машина – железнодорожный состав для выправки пути в различном профиле и в плане, а также для уплотнения щебня. Обычно используются для строительных целей, ремонта пути. Рабочие органы состава являются расположенными над каждой рельсовой нитью: специализированные блоки подъёмно-рихтовочных устройств. Подбивочные блоки хранят по 16 стоек, нижние концы колеблются в пределах 10–15 мм. На рис. 1 представлен чертёж Duomatic 09-32.
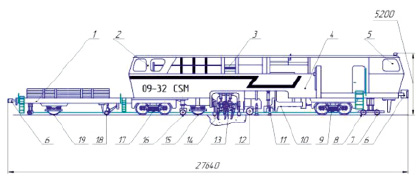
Рис. 1. Чертёж Duomatic 09-32 (1 – полуприцепная платформа, 2, 5 – кабины машиниста и оператора, 3 – нивелировочная контрольно-измерительная система,4 – корпус с силовым агрегатом, 6 – автосцепка, 7, 12, 16, 18 – тележки, 8 – мерный каток с датчиком пути, 9, 17 – тяговая и бегунковая ходовые тележки, 10 – спутник, 11 – подъёмно-рихтовочное устройство, 13 – подбивочные блоки, 14 – уплотнители балласта, 15, 19 – приводные колесные пары)
Имитация реального специального самоходного подвижного состава и алгоритм работы электрической, пневматической и гидравлической схем позволяют полностью воспроизвести полноценное натурное движение состава, а также реализовать физические процессы и модели окружающего мира.
В обучении осуществляется регистрация всех действий машиниста и оператора, а также параметры для специального самоходного поездного состава и действия обучаемого в рамках специальной программы и алгоритма действий, анализа поездок. Реализованы переговоры помощника и машиниста, диспетчера и соседних локомотивов. Составлен программный комплекс, способный определять корректность разговоров и способный в процентном соотношении анализировать и выводить оценку качества разговоров в рамках регламента переговоров [6, 7].
Производится максимально точная симуляция процессов окружающего мира, которая воспроизводит все условия, дождь, снег, солнце, внештатные ситуации, капли на лобовом стекле, время суток, температуру окружающей среды.
Программа изменяет коэффициент сцепления, условия видимости, работу системы торможения, условия низкой температуры.
В работе производится расчёт электрической, пневматической, а также гидравлической схем, воздухораспределителей, кранов, реле, переключателей, силовых агрегатов. Моделируется электрический ток в электросхеме. Расчёт давления в пневмо-системе имитирует реальное изменение воздуха, анимацию данного процесса, системы поиска утечек, их создание, отслеживание поведения и реакцию обучаемого [8, 9].
В программном комплексе используется 15 сенсорных мониторов: 9 мониторов ASUS – диагональ 40 дюймов; 6 мониторов ASUS – диагональ 43 дюйма
На рис. 2 отображен пульт машиниста, осуществляющего операции:
- Движения ССПС.
- Выпрямление.
- Рихтовка.
- Подъёмка.
Разработка осуществлялась в программах:
- Microsoft Visio.
- Corel draw.
- C#.
- Unity 3D.
- Axure RP.

Рис. 2. Пульт машиниста
В процессе разработки была реализована блок-схема регламента переговоров для создания специализированного ПО разработчиками, а также прототип интерфейса, тип сохранения, логирование.
Концепт виртуального тренажёра Duomatic 09-32
В процессе виртуального моделирования, использования языков C#, Unity 3D, 3ds MAX реализована готовая концепция виртуального тренажёра с сенсорными кнопками, переключателями, регуляторами, реализован путь в 150 км, окружающая обстановка соответствует действительности, подобраны звуки, описывающие реалистичные модели поведения окружающей среды, поездного состава, переключения кнопок, разгон, торможение. Это поистине уникальный продукт и новейшее внедрение сенсорных технологий, программной логики в мир IT инноваций [10].
Реализованы функции:
- Модуль устранения неисправностей.
- Имитация машиниста.
- Имитация работы оператора.
- Нештатные ситуации, 86 шт.
- Регламент переговоров.
- Рабочее место инструктора.
- Создание новой группы.
- Создание нового студента.
- Выбор точки старта.
- Выбор погоды.
- Выбор времени виртуального мира.
Заключение
Созданный виртуальный тренажер обладает всеми необходимыми требованиями для подготовки машинистов-операторов Duomatic 09-32, реализован режим инструктора, модуль устранения неисправностей, регламент переговоров. Аппаратно-программный комплекс позволяет проходить практические упражнения в разных условиях окружающей среды, отрабатывать навыки управления специализированным самоходным поездным составом и осуществлять подбивочно-рихтовочно-выпрямительные операции.
Библиографическая ссылка
Сатдаров М.Р., Староверова Н.А. Разработка виртуального тренажёра Duomatic 09-32 // Современные наукоемкие технологии. 2018. № 7. С. 84-87;URL: https://top-technologies.ru/en/article/view?id=37083 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.37083