


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
MAZHORITY SIGNALS WITH AN ACCEPTABLE LEVEL MISMATCH IN MAJORITY-REDUNDANT SYSTEM

Цель и задачи исследования
Целью проводимого исследования является повышение живучести мажоритарно-резервированных систем с тройным резервированием, в состав которых входят резервированные функциональные модули с допустимым уровнем рассогласования параметров. Для достижения поставленной цели решается задача мажоритирования сигналов с допустимым уровнем рассогласования параметров от функциональных модулей различных комплектов. Цель достигается за счет доработки схем контроля мажоритарных элементов и определения алгоритма обработки сигналов контроля работы мажоритарных элементов различных комплектов мажоритарно-резервированной системы.
В работах [1; 3] рассматривается возможность повышения живучести резервированных систем управления, в том числе мажоритарно-резервированных. В работе [1] cинтезирована схема управляемого мажоритарного элемента, позволяющая снизить вероятность отказа узлов с мажоритарным резервированием.
Однако в случае расхождения значений различных комплектов срабатывают схемы контроля работы МЭ, что затрудняет оценку погрешностей обработки сигналов функциональных модулей, таких как, например, аналого-цифровые преобразователи (АЦП).
В ходе проведенного исследования рассматривается вопрос мажоритирования сигналов различных комплектов в случае расхождения их значений в установленных допустимых пределах.
Разработка схемы обработки сигналов контроля мажоритарных элементов
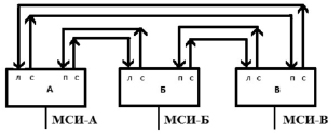
Рис. 1. Структурная схема системы комплексирования комплектов ПУ и КП
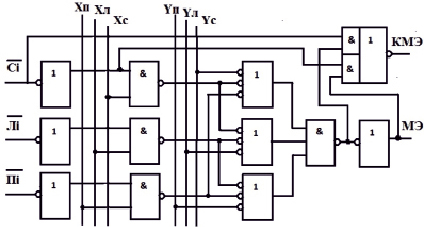
Рис. 2. Функциональная схема управляемого мажоритарного элемента
На рис. 1 изображена схема системы комплексирования комплектов пункта управления (ПУ) и контролируемых пунктов (КП) автоматизированной системы управления технологическими процессами, в дальнейшем – АСУ ТП, где А, Б, В – это резервированные комплекты ПУ или КП; МСИ-А, МСИ-Б, МСИ-В – это магистрали системных интерфейсов комплектов А, Б, В соответственно [1].
В качестве исходных данных для схем резервирования введены следующие обозначения:
1) С – сигнал своего комплекта;
2) Л – сигнал левого комплекта;
3) П – сигнал правого комплекта;
4) ПУ – пункт управления;
5) КП – контролируемые пункты.
В работах [2; 4; 5] подробно рассмотрены вопросы синхронизации работы мажоритарных элементов резервированных комплектов.
В работе [1] синтезирована функциональная схема управляемого мажоритарного элемента, представленного на рис. 2.
На входы схемы поступают сигналы своего (С), левого (Л) и правого (П) комплекта (на рис. 2 изображена схема мажоритирования одного из разрядов комплекса).
В результате работы схем мажоритарных элементов на их выходах образуются собственно сигналы – результирующие значения мажоритирования входных величин (МЭ) от своего, левого и правого комплектов, а также соответствующие каждому сигналу на входе разряды контроля работы мажоритарных элементов (МЭ), говорящие о совпадении (КМЭ = 0) или несовпадении (КМЭ = 1) значений сигнала своего комплекта (С) с мажоритарным значением (МЭ). Сигналы КМЭ предполагается использовать в дальнейшем как для диагностики работы аппаратуры комплектов, так и для накопления достоверности в ходе их работы.
В работе [1] описано, как с помощью программно задаваемых признаков резервирования можно следить за работой каждого из комплектов комплекса в отдельности, т.е. обращаться к резервированным функциональным модулям комплектов как к нерезервированным с дальнейшей программной обработкой накопленной информации, т.е. реализовать программно режимы 1002,1003 работы комплектов. Основным недостатком в этом случае является то, что не всегда удается повысить достоверность полученных результатов по сравнению с мажоритарным режимом работы.
В ходе проведенного исследования авторы столкнулись с проблемой мажоритирования сигналов получаемых с выходов функциональных модулей аналого-цифровых преобразователей различных комплектов (А, Б, В), в дальнейшем – АЦП, так как значения параметров различных комплектов могут быть отличны друг от друга. Эта проблема возникает в режимах работы 2002, 2003 резервированных комплектов.
В ходе проведенного исследования решена задача мажоритирования сигналов с допустимым уровнем рассогласования параметров от функциональных модулей различных комплектов.
В качестве примера может быть рассмотрена схема мажоритирования сигналов с выходов функциональных модулей аналого-цифровых преобразователей, в дальнейшем – АЦП. При этом в качестве исходного требования примем – допустимый разброс параметров АЦП различных комплектов.
Например, в случае допустимого разброса параметров в один квант (для простоты изложения предположим, что на выходе АЦП восьмибитные данные) и значения комплектов А, Б, В соответственно равны 01000000, 00111111, 00111111. В результате мажоритирования получим значение 00111111. В этом случае сработают схемы контроля работы мажоритарных элементов в комплекте А разрядов с шестого по нулевой (КМЭ6-КМЭ0 = 1), т.е. будут зафиксированы несовпадения данных комплекта А с данными результатов мажоритирования в семи разрядах, хотя разница значений параметров сигналов не превысила один квант. Чтобы исключить наличие некорректности в работе комплекта А, задача мажоритирования может быть решена следующим образом.
Комплект А с помощью цепей коррекции инвертирует свои разряды с пятого по нулевой (5-0) прежде чем передать их значения соседним комплектам Б и В, что позволит уйти от ложных срабатываний цепей контроля мажоритарных элементов разрядов с пятого по нулевой.
Однако рассмотренное решение имеет ряд недостатков, таких как:
1) добавляется схема цепей коррекции сигналов подаваемых на входы мажоритарных элементов соседних комплектов;
2) в случае расхождения значений параметров сигналов различных комплектов, подлежащих мажоритированию, более чем в один кван, усложняется схема цепей коррекции сигналов подаваемых на входы мажоритарных элементов соседних комплектов, а также усложняется алгоритм обработки сигналов КМЭ.
Эти недостатки ограничивают применение в мажоритарно-резервированных системах функциональных модулей с допустимым, практически любым разбросом параметров, что особенно важно в АСУ ТП.
Для устранения этих недостатков в случае превышения уставки допустимого разброса значений параметров сигналов на входах мажоритарных элементов от различных комплектов будем фиксировать это в регистре состояния комплекта.
В ходе исследования предложен алгоритм обработки сигналов на выходе мажоритарных элементов. При этом необходимо доработать схему мажоритарной системы в части контроля ее работы, как показано на рис. 3.
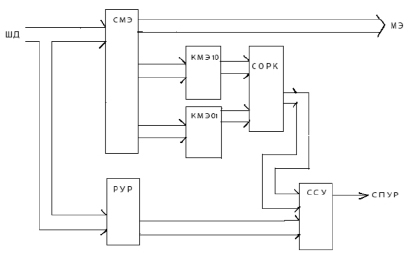
Рис. 3. Схема мажоритарной системы в части контроля ее работы
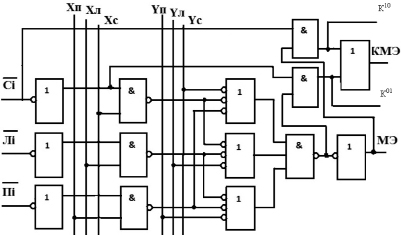
Рис. 4. Функциональная схема управляемого мажоритарного элемента с доработкой
Основное назначение схемы заключается в определении превышения значений параметров сигналов заданной уставки допустимого рассогласования результатами мажоритирования различных комплектов ПУ или КП. Максимальный размер уставки рассогласования ограничивается только разрядной сеткой шины данных комплектов.
На рис. 3 приняты следующие обозначения:
1) СМЭ – схема собственно мажоритарных элементов;
2) РУР – регистр хранения значения допустимой уставки рассогласования сигналов своего комплекта с сигналами на выходе МЭ;
3) КМЭ10, КМЭ01 – регистры фиксирующие сигналы контроля работы МЭ;
4) СОРК – схема определения рассогласования кодов, поступающих от регистров КМЭ10, КМЭ01;
5) ССУ – схема сравнения кодов сигналов рассогласования с допустимой уставкой с выхода регистра РУР, задаваемой программно;
6) СПУР – сигнал превышения заданной уставки рассогласования.
Функциональная схема мажоритарного элемента, доработанная в части формирования сигналов контроля его работы, соответствующая схеме, представленной на рис. 3, приведена на рис. 4.
Здесь К10 – сигнал контроля работы мажоритарного элемента, означающий, что в этом разряде мажоритарный сигнал равен единице, а сигнал своего комплекта равен нулю; К01 – сигнал контроля работы мажоритарного элемента, означающий, что в этом разряде мажоритарный сигнал равен нулю, а сигнал своего комплекта равен единице. Дополнительно введем регистры для хранения результатов контроля работы мажоритарных элементов КМЭ10 и КМЭ01.
Рассмотрим работу схемы изображенной на рис. 3, при этом примем следующие допущения, упрощающие описание ее работы – будем оперировать с восьмибитными данными.
В качестве примера рассмотрим следующий. Предположим, что сигнал на выходе мажоритарной системы равен 00010101, а сигнал своего комплекта – 00001100 (т.е. расхождение значений своего комплекта с мажоритарным равно –9 = 12–21). В этом случае сработают цепи контроля работы мажоритарных элементов разрядов 4, 3, 0.
На выходе системы контроля работы мажоритарных элементов получим соответствующий код равный – 000К10 К0100К10 , т.е. в регистре КМЭ10 – 00010001(17), а в регистре КМЭ01 – 00001000(8).
Таким образом, на входы схемы СОРК поступят двоичные коды чисел 17 и 8, а на выходе схемы СОРК в результате получим 8 – 17 = – 9, т.е. значение кода сигнала рассогласования комплектов. Этот код поступит на вход схемы ССУ, где сравнится с кодом допустимой уставки рассогласования, заданной программно, и поступающего с выхода регистра РУР.
В случае если значение этого кода превышает значение уставки рассогласования, поступающей с выхода регистра РУР, будет сформирован активный сигнал – СПУР, который может быть записан в регистр состояния комплекта, доступного в программном режиме.
Наличие активного значения сигнала СПУР говорит о превышении заданной уставки рассогласования значений параметров сигналов, поступающих на входы мажоритарных элементов различных комплектов.
Выводы
Предложенный алгоритм обработки сигналов рассогласования может быть использован при обработке сигналов с выходов не только функциональных модулей АЦП, используемых при обработке сигналов ТИТ – телеизмерений текущих, но и любых других, например сигналов ТИИ – телеизмерений интегральных, сигналов ТУ – телеуправления и ТР – телерегулирования, в том числе в диагностических целях аппаратных средств систем резервирования.
В результате проведенного исследования предложена схема доработки мажоритарного элемента в части контроля его состояния, а также разработана схема анализа сигналов рассогласования в мажоритарно-резервированной системе со схемой резервирования – 2003, удовлетворяющая предложенному алгоритму обработки сигналов контроля работы мажоритарных элементов резервированных комплектов в режимах работы 1002, 1003, 2002, 2003.
Библиографическая ссылка
Сыцевич Н.Ф., Кулиев Р.С., Крахмалев Д.В., Жабоев Ж.Ж. МАЖОРИТИРОВАНИЕ СИГНАЛОВ С ДОПУСТИМЫМ УРОВНЕМ РАССОГЛАСОВАНИЯ В МАЖОРИТАРНО-РЕЗЕРВИРОВАННЫХ СИСТЕМАХ // Современные наукоемкие технологии. 2017. № 5. С. 73-77;URL: https://top-technologies.ru/en/article/view?id=36671 (дата обращения: 27.07.2026).