


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
THE DECREASE OF TORQUE PULSATIONS OF FREQUENCY CONTROLED INDUCTION MOTOR

К числу актуальных задач в области частотно-управляемых асинхронных электроприводов относится разработка достаточно простых и эффективных способов расширения диапазона регулирования скорости вращения электродвигателя вниз от номинального значения, достижение которого возможно при повышении равномерности вращения ротора за счет уменьшения амплитуды и (или) увеличения частоты пульсаций электромагнитного момента, создаваемого машиной. Одним из наиболее перспективных направлений в этой области является использование модуляции выходного напряжения преобразователя частоты в процессе регулирования скорости вращения. До недавнего времени способы формирования выходного напряжения преобразователя, разработанные в рамках этого направления, сводились лишь к широтно-импульсной модуляции (ШИМ) указанного напряжения по синусоидальному закону без применения амплитудной модуляции. Однако в [1-3, 7] было показано, что достаточно эффективным является другой подход к формированию напряжения преобразователя (в рамках рассматриваемого направления): использование его амплитудной модуляции, которая не вносит несимметрии в систему фазных напряжений. Эта модуляция может быть сведена к широтно-импульсной (по более простому закону, чем синусоидальный).
Множество алгоритмов управления преобразователем частоты, которые могут быть применены при реализации последнего подхода, не исчерпываются теми, что перечислены в [1, 2, 7]. Так, например, в [4-6] показано, что при увеличении числа фаз инверторной электромеханической системы переменного тока более четырех появляется возможность для использования принципиально новых, нетрадиционных способов управления вентильными элементами преобразователя частоты и всей электромеханической системой в целом.
В данной работе приведено описание еще одного способа формирования напряжения преобразователя, основанного на использовании амплитудной модуляции и названного авторами «компенсационно-моментным».
При использовании
предлагаемого способа управления преобразователем частоты фазное напряжение ui последнего при
числе фаз, равном трем, будет иметь вид, показанный на рис. 1, где i - номер фазы преобразователя; ![]() ; m - число фаз (в
рассматриваемом случае m=3); ω0 - угловая
частота основной (первой) гармоники напряжения ui; t - время; B - коэффициент компенсации; B≥0.
; m - число фаз (в
рассматриваемом случае m=3); ω0 - угловая
частота основной (первой) гармоники напряжения ui; t - время; B - коэффициент компенсации; B≥0.
Если в качестве преобразователя частоты используется преобразователь со звеном постоянного тока с автономным инвертором напряжения (АИН), то U0 - постоянная составляющая напряжения на входе АИН.
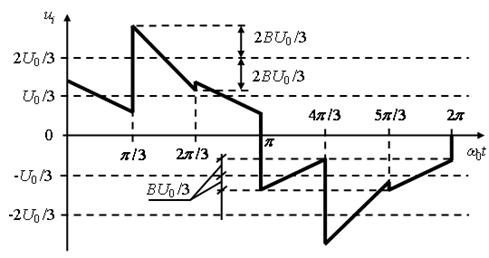
Рис. 1. Выходное фазное напряжение 3-фазного преобразователя частоты
В общем случае (для произвольного значения m) такое фазное напряжение в математической форме описывается следующим образом:
- при соединении фазных обмоток статора электродвигателя в звезду без нулевого провода:
 ;
;
- при соединении фазных обмоток статора в звезду с нулевым проводом или в m-угольник:
![]() ,
,
где
![]()
![]()
![]()
Формирование фазного напряжения такого вида при наличии преобразователя частоты с АИН возможно следующей способами:
- за счет применения соответствующей (пилообразной) амплитудной модуляции напряжения на входе АИН (рис. 2, где UП - напряжение на входе инвертора);
- за счет применения ШИМ (рис. 3) напряжения на входе АИН или непосредственно фазного напряжения инвертора (путем использования соответствующих алгоритмов управления вентильными элементами АИН).
Реализация первого способа возможна при наличии в структуре преобразователя управляемого выпрямителя. При использовании второго способа коэффициент заполнения импульсов ШИМ изменяется во времени по закону, аналогичному тому, что показан на рис. 2.
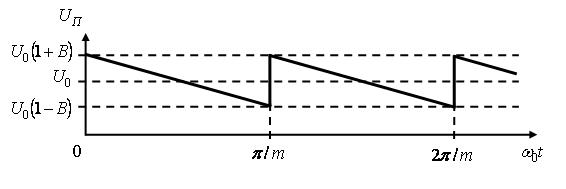
Рис. 2. Пилообразная амплитудная модуляция напряжения на входе АИН
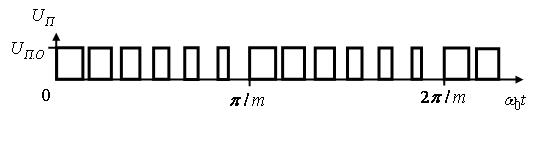
Рис. 3. Широтно-импульсная модуляция напряжения на входе АИН по пилообразному закону
Ниже представлены результаты исследования
установившихся электромагнитных процессов в системе «АИН -
3-фазный асинхронный двигатель (АД) типа
А02-32-4 мощностью 3 кВт». На рис. 4 приведены зависимости размаха пульсаций
момента ΔM (в процентах к постоянной
составляющей момента), развиваемого двигателем, от коэффициента компенсации B для различных значений
относительного скольжения s ротора АД. При
этом значение B=0 соответствует обычному
180-градусному управлению вентилями инвертора. Представленные зависимости
показывают, что при любом скольжении размах пульсаций момента АД существенно
зависит от значения параметра B: при
увеличении B сначала происходит
снижение размаха пульсаций момента, а затем - его неограниченное увеличение.
Для любого значения s существует некоторое
оптимальное значение (Bопт) коэффициента B, при котором достигается минимизация пульсаций момента
АД. Величина Bопт, является
функцией скольжения (рис. 5): Bопт увеличивается
с ростом s и стремится к нулю при s→0.
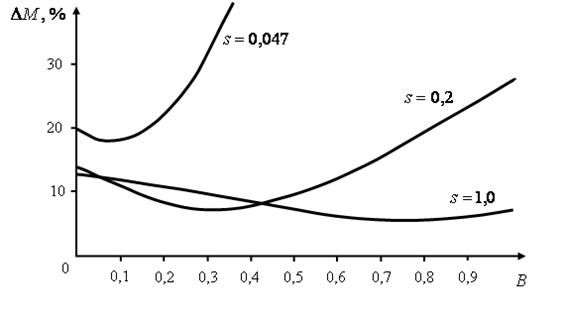
Рис. 4. Зависимости размаха пульсаций момента на валу ротора АД от параметра B
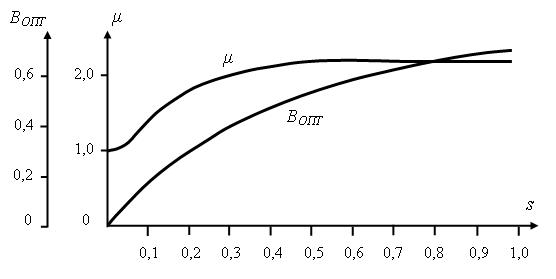
Рис.
5. Зависимости Bопт и μ от величины относительного скольжения
ротора АД
Для оценки эффективности применения предлагаемого способа управления преобразователем частоты целесообразно использовать параметр
![]() ,
,
где ΔM0 - размах пульсаций момента АД при B=0, т.е. при 180-градусном управлении вентилями АИН; ΔMmin - значение ΔM при B=Bопт для данного скольжения.
Зависимость μ от s (рис. 5) показывает,
что с ростом скольжения величина μ
(а, следовательно, и эффективность применения
предлагаемого способа управления преобразователем) увеличивается. Так, если при s=0 использование рассматриваемого
способа не дает никакого положительного эффекта, то при s=1 и B=Bопт размах пульсаций момента в 2,3 раза меньше, чем при обычном
180-градусном управлении.
При этом форма пульсаций момента, развиваемого АД, практически не зависит от значения параметра B.
Результаты, подученные в ходе проведенного исследования, показывают, что эффективность предлагаемого способа управления преобразователем частоты практически не зависит от числа фаз электропривода и при любом m использование этого способа приводит к эффекту, аналогичному описанному выше при m=3.
Объяснение тому факту, что при использовании компенсационно-моментного способа управления происходит уменьшение размаха пульсаций момента электродвигателя, может быть получено как на спектральном уровне, так и на уровне мгновенных значений. На спектральном уровне этот эффект может быть объяснен тем, что при таком управлении вентилями АИН (т.е. при B=Bопт) происходит уменьшение (по сравнению со случаем, когда И=0) амплитуд гармоник фазных напряжений инвертора, порядки которых удовлетворяют равенству
![]() ,
,
где с - порядки названных выше гармоник; k0=1,2,3,... От значений амплитуд именно этих гармоник в большой степени зависит размах пульсаций момента АД.
На уровне мгновенных значений рассматриваемый эффект объясняется следующим: пилообразное изменение фазного напряжения инвертора, которое имеет место при компенсационно-моментном способе управления преобразователем, порождает дополнительную составляющую пульсаций момента АД, находящуюся в противофазе с той составляющей этих пульсаций, наличие которой обусловлено дискретным характером переключений вентилей инвертора. Частоты этих составляющих одинаковы. Наложение указанных компонент приводит к их частичной компенсации (вследствие чего предлагаемый способ управления получил свое название) и, тем самым, к уменьшению размаха пульсаций момента АД.
Результаты проведенного исследования позволяют сделать вывод о том, что предложенный в статье способ управления преобразователем частоты целесообразно использовать для расширения диапазона регулирования скорости вращения ротора электродвигателя вниз от номинального значения при любом числе фаз электропривода. Эффективность применения этого способа соизмерима с эффективностью ШИМ по синусоидальному закону, а его реализация представляется более простой, чем реализация названной ШИМ.
СПИСОК ЛИТЕРАТУРЫ
1. Бражников А.В., Кочетков В.П. Многофазный частотно-регулируемый электропривод по системе АИН-АД // Сборник материалов VI Международной научно-технической конференции «ЕЛМА ‘90». - Варна (Болгария), 1990. - С. 44.
2. Бражников А.В., Кочетков В.П. Многофазный частотно-регулируемый электропривод по системе АИН-АД // Депонированная рукопись. - София (Болгария): ЦИНТИ Болгарии. - № ЕЛ-22-164/20.12.1990 ФНТД, рукопись № 12, 1990. - 10 с.
3. Бражников А.В. Расширение диапазона регулирования скорости частотно-управляемого электродвигателя // Сборник научных трудов «Повышение эффективности работы горного оборудования при освоении месторождений полезных ископаемых». - Красноярск: Издательство ГАЦМиЗ, 1995. - С. 61-67.
4. Бражников А.В., Гилев А.В., Довженко Н.Н., Белозеров И.Р. Разработка и создание нового поколения магнитогидродинамических систем принудительной циркуляции металлических расплавов // Современные наукоемкие технологии, 2009, № 1, с. 8-9.
5. Бражников А.В., Гилев А.В., Довженко Н.Н., Белозеров И.Р. Разработка и создание нового поколения инверторных электроприводов переменного тока с расширенными регулировочными возможностями // Фундаментальные исследования, 2009, № 2, с. 72-73.
6. Бражников А.В., Гилев А.В., Белозеров И.Р. Нетрадиционный способ регулирования скорости многофазного асинхронного электродвигателя // Фундаментальные исследования, 2009, № 5, с. 10-12.
7. Кочетков В.П., Бражников А.В., Дубровский И.Л. Теория электропривода. - Красноярск: Издательство КрПИ, 1991. - 140 с.
Библиографическая ссылка
Бражников А.В., Бабин В.А., Гилёв А.В., Белозеров И.Р. СНИЖЕНИЕ ПУЛЬСАЦИЙ МОМЕНТА АСИНХРОННОГО ЧАСТОТНО-УПРАВЛЯЕМОГО ЭЛЕКТРОДВИГАТЕЛЯ // Современные наукоемкие технологии. 2009. № 11. С. 11-16;URL: https://top-technologies.ru/en/article/view?id=25936 (дата обращения: 03.07.2026).