



Водоснабжение является очень важным аспектом функционирования любого гражданского или промышленного объекта. Перебои и нарушения водоснабжения могут привести к достаточно тяжелым экономическим последствиям. Соответственно, процесс водоснабжения нормируется определенными государственными стандартами, требующими выполнения следующих требований [1]: создание условий по обеспечению потребителей доброкачественной питьевой водой, одним из факторов санитарно-эпидемиологического благополучия; повышение эффективности, надежности и качества работы систем и сооружений коммунального водоснабжения и канализации; улучшение организации управления и эксплуатации систем водоснабжения; обеспечение энергоресурсосбережения.
На территории Забайкальского края и регионов со сходными природными условиями широко используются системы водоснабжения с накапливающим резервуаром.
Одной из основных проблем эксплуатации подобных систем является сброс излишков воды, перекачиваемых насосными агрегатами первого подъема, из накапливающего резервуара в окружающую среду (перелив жидкости), что ведет к достаточно большим неоправданным экономическим затратам, связанным с холостым расходом электроэнергии и преждевременным износом узлов насосного агрегата, не говоря уже о растрате артезианских водных ресурсов. Известно, что расход электроэнергии на перелив воды может достигать до 45–50 % от общего годового энергопотребления.
Еще одной важной проблемой является замерзание трубопроводной линии на участке первого подъема. В мировой практике в условиях сурового климата используется подземный способ прокладки трубопроводов систем водоснабжения, защита от замерзания которых осуществляется либо путем утепления различными материалами, либо путем прокладки в непосредственной близости от теплотрасс [2]. Данные способы имеют определенные недостатки, связанные с высокими издержками при прокладке и обслуживании линий большой протяженности, также они не подходят для болотистых типов грунта, распространенных на востоке Российской Федерации.
В настоящее время в Забайкальском крае и во многих других регионах Российской Федерации (особенно в северных районах Сибири и Дальнего Востока) широко используются надземные и наземные трубопроводные линии (открытые трубопроводы). Это обуславливается рядом преимуществ такого способа прокладки труб [3]. Для предотвращения замерзания таких систем зачастую используется способ подачи по трубопроводу максимального расхода жидкости без дополнительных нагревательных элементов (примером может служить система водоснабжения пгт. Новоорловск Забайкальского края), что усугубляет проблему перелива воды.
Целью данной работы является описание экономически эффективного способа предотвращения замерзания трубопровода надземной прокладки, минимизирующего отрицательный экономический эффект от перелива жидкости. Способ реализуется при помощи создания программно-аппаратного комплекса управления насосными агрегатами первого подъема.
Постановка задачи
При решении проблемы перелива воды необходимо производить контроль уровня воды в накапливающем резервуаре и соответствующим образом динамически изменять величину объемного расхода в напорном трубопроводе. При этом целесообразно в качестве объекта регулирования выбрать насосный агрегат первого подъема, производительность которого будет определять расход воды. Регулирование производительности объекта эффективно осуществлять при помощи частотного преобразователя.
Необходимо отметить, что при регулировании величины расхода жидкости будет изменяться и её температура, поскольку температура прямо пропорциональна диссипативной теплоте трения qt, рассчитываемой по формуле (1) и зависящей от объемного расхода Q, м3/с [3].
qt = gρQI, (1)
где g – ускорение свободного падения, м/с2; ρ – плотность перекачиваемой жидкости, кг/м3; I – гидравлический уклон в трубопроводе, рассчитываемый для различных типов трубопроводов по соответствующим методикам [4].
Таким образом, изменение расхода воды увеличивает вероятность замерзания трубопровода. Поэтому при реализации алгоритма управления необходимо учитывать температуру воды в конечной части трубопровода, как самой невыгодной точке системы.
Анализ эффективности предлагаемого способа
Для анализа эффективности и границ применения рассматриваемого способа выполнялись расчеты температуры жидкости в конечной части трубопровода tk по формуле (2) [3].

 (2)
(2)
где qt – диссипативная теплота трения, вычисляемая по формуле (1), Вт/м; J – температура окружающей среды, °С; tn – температура в начальной части трубопровода, °С; Cv – объемная теплоемкость воды, Дж/(м3• °С); L – длина трубопровода, м; Q – расход жидкости, м3/с; k1 – коэффициент теплопередачи от воды к стенке трубы, Вт/(м• °С); kpr – приведенный коэффициент теплопередачи, Вт/(м• °С).
По данной формуле были произведены расчеты полипропиленовых трубопроводов без внешней изоляции. Температура в начале трубопровода была принята равной 3,5 °С. Скорость ветра принята близкой к нулю. Внутренний диаметр трубопровода (d1) был принят равным 150 мм, внешний диаметр трубопровода – 165 мм, длина трубопровода – 5000 м. Температура окружающей среды принимала значения –25 °С, –10 °С и 0 °С. Расход изменялся в диапазоне от 0,0002 м3/с до 0,0036 м3/с с шагом 0,2.
В результате были получены зависимости температуры от расхода, представленные в таблице.
Зависимость tk от Q
|
№ п/п |
Q, м3/с |
d1 = 150 мм и L = 5000 м |
||
|
tk, °С, J = –25 °С |
tk, °С, J = –10 °С |
tk, °С, J = 0 °С |
||
|
1 |
0,0002 |
–4,81908 |
0,027674 |
2,671723 |
|
2 |
0,0004 |
–1,02125 |
1,633699 |
3,05766 |
|
3 |
0,0006 |
0,398974 |
2,224868 |
3,198444 |
|
4 |
0,0008 |
1,140668 |
2,531748 |
3,271274 |
|
5 |
0,001 |
1,596161 |
2,719604 |
3,315776 |
|
6 |
0,0012 |
1,904277 |
2,846421 |
3,345783 |
|
7 |
0,0014 |
2,12657 |
2,937789 |
3,367385 |
|
8 |
0,0016 |
2,294509 |
3,006746 |
3,383679 |
|
9 |
0,0018 |
2,425857 |
3,060636 |
3,396407 |
|
10 |
0,002 |
2,531396 |
3,103912 |
3,406625 |
|
11 |
0,0022 |
2,618053 |
3,139427 |
3,415008 |
|
12 |
0,0024 |
2,690478 |
3,169097 |
3,42201 |
|
13 |
0,0026 |
2,751911 |
3,194256 |
3,427946 |
|
14 |
0,0028 |
2,804678 |
3,21586 |
3,433042 |
|
15 |
0,003 |
2,850492 |
3,234612 |
3,437466 |
|
16 |
0,0032 |
2,890641 |
3,251042 |
3,44134 |
|
17 |
0,0034 |
2,926117 |
3,265557 |
3,444763 |
|
18 |
0,0036 |
2,957689 |
3,278472 |
3,447808 |
На рис. 1 представлены графические интерпретации полученных зависимостей.
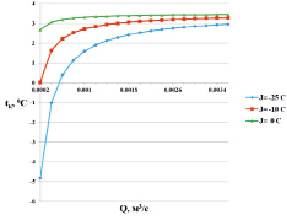
Рис. 1. Зависимость температуры от расхода
Анализируя полученные данные, можно сделать вывод, что графически зависимость температуры жидкости в конечной части трубопровода от расхода является криволинейной и напоминает логарифмическую. Видно, что при величине расхода ниже определенной отметки значительно возрастает риск замерзания трубопровода, поэтому в алгоритм управления необходимо добавить возможность применения экстренных мер при достижении критической температуры. Но на остальном, более протяженном участке графиков температура достаточно стабильно держится возле отметки начальной температуры жидкости, что позволяет сделать вывод о целесообразности применения разрабатываемого алгоритма.
Полученные данные можно использовать для оценки границ применимости рассматриваемого способа управления насосными агрегатами, а также для прогнозирования режимов работы всей системы водоснабжения.
Реализация способа
Принципиальная схема системы водоснабжения и аппаратной части комплекса, решающего поставленные задачи, приводится на рис. 2 [5]. В соответствии с рисунком, система содержит следующие компоненты: емкость – источник жидкости; несколько попеременно работающих насосов (на схеме 3 штуки); частотный преобразователь; коммутирующий блок; расходомер; запорную арматуру; датчик температуры; накапливающий резервуар с ультразвуковым или поплавковым датчиком уровня; конечный потребитель жидкости; устройство сбора данных (преобразователь интерфейсов); устройство проводной или беспроводной связи; устройство управления.
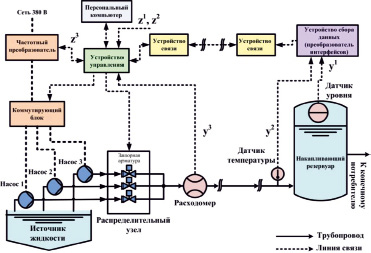
Рис. 2. Схема аппаратной части системы
Данная система работает следующим образом: насосный агрегат перекачивает жидкость из емкости-источника (скважины) в накапливающий резервуар по трубопроводу открытой прокладки. Информация о текущем уровне жидкости в емкости-сборнике (y1) фиксируется датчиком уровня и вместе с температурой жидкости в конце трубопровода (y2), измеряемой датчиком температуры, передается в устройство сбора данных. Далее значения уровня и температуры передаются по радиоканалу или кабельной линии при помощи устройств связи. Затем эти величины поступают в устройство управления, где производится их анализ и вычисление величины расхода жидкости (z3). Полученный расход передается на частотный преобразователь, который будет поддерживать его в трубопроводе за счет наличия обратной связи от расходомера. Требуемое значение уровня жидкости в емкости-сборнике (z1) и требуемое значение температуры на выходе трубопровода (z2) задаются оператором при настройке системы.
Регулирование расхода жидкости по уровню в накапливающем резервуаре целесообразно осуществлять по принципу пропорционально-интегрально-дифференциального (ПИД) регулирования. Управляющее воздействие в этом случае вычисляется по формуле (3) [6].
 (3)
(3)
где Out – значение выходного параметра (управляющее воздействие); G – коэффициент масштабирования; e – ошибка управления (разность между требуемой и действительной величиной параметра); K – коэффициент усиления пропорциональной составляющей ошибки; I – коэффициент усиления интегральной составляющей ошибки; i – коэффициент усиления дифференциальной составляющей ошибки.
Выходной параметр, в качестве которого выступает оптимальная величина расхода z3, подается на частотный преобразователь, который выполняет корректировку частоты вращения электродвигателя основного насоса, а соответственно, и расхода воды, подаваемого в накапливающий резервуар, что позволяет экономически эффективно поддерживать требуемый уровень воды. Для предотвращения замерзания трубопровода в алгоритм расчета величины расхода вводится дополнительный ПИД канал, вычисляющий управляющее воздействие по температуре перекачиваемой жидкости в конечной части трубопровода.
Для реализации описанного способа в цифровой системе управления необходимо преобразовать ПИД-закон в дискретную форму и выбрать длительность тактов квантования T0. В результате будут вычислены полное управляющее воздействие по уровню uL(i) и по температуре uТ(i) на текущем такте квантования i.
Далее было впервые предложено соотношение (4) для выбора оптимального расхода z3(i) на основании двух полученных ранее значений [5]:
 (4)
(4)
где GT – коэффициент масштабирования управляющего воздействия по температуре; GL – коэффициент масштабирования управляющего воздействия по уровню; Rmax – максимально возможная величина расхода; zk – критическая температура.
Выбор наибольшего управляющего воздействия по первому выражению в формуле (4) позволяет либо осуществлять эффективное наполнение накапливающего резервуара, либо предотвратить замерзание трубопровода. Кроме того, если температура в трубопроводе y2(i) меньше zk, то в качестве величины расхода выбирается максимально возможная величина расхода Rmax, что является экстренной мерой, в случае неэффективности основного алгоритма.
Блок-схема алгоритма программы для реализации описанного способа представлена на рис. 3.
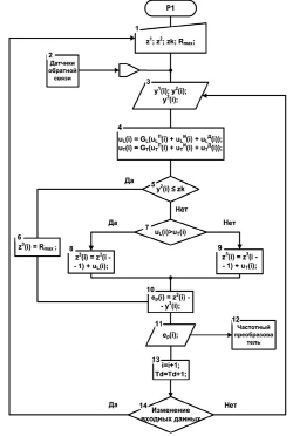
Рис. 3. Блок-схема алгоритма управления
В блоке 1 данной схемы производится ввод входных данных, таких как уставки по уровню и по температуре, критическая температура и максимально возможная величина расхода. Блоки 2 и 3 реализуют считывание информации с датчиков обратной связи (температура, уровень и расход). В блоках 4–10 производится расчет управляющего воздействия. Блоки 11 и 12 отвечают за передачу управляющего воздействия исполнительному механизму (частотному преобразователю). Блоки 13 и 14 осуществляют переход к последующей итерации (такту) алгоритма.
Заключение
Разработанный способ управления насосными агрегатами первого подъема позволит значительно снизить экономические затраты на эксплуатацию систем водоснабжения с накапливающим резервуаром, а также повысить надежность и бесперебойность их функционирования. Следует отметить, что система управления, реализующая способ, может быть интегрирована в более глобальные системы управления технологическими процессами, за счет использования стандартных промышленных интерфейсов связи, а также может быть расширена дополнительными устройствами и функциональными возможностями. К примеру, целесообразным решением является интеграция в систему управления защитно-диагностирующих устройств, позволяющих оценить ресурс насосных агрегатов для предотвращения аварийных ситуаций, связанных с внезапным выходом насоса из строя.
Работа выполняется в рамках договора № 9647ГУ/2015 от 01.02.2016 с Фондом содействия инновациям по программе У.М.Н.И.К.-2015.
Библиографическая ссылка
Палкин Г.А., Суворов И.Ф. УПРАВЛЕНИЕ НАСОСНЫМИ АГРЕГАТАМИ ПЕРВОГО ПОДЪЕМА СИСТЕМЫ ВОДОСНАБЖЕНИЯ С НАКАПЛИВАЮЩИМ РЕЗЕРВУАРОМ // Современные наукоемкие технологии. 2017. № 7. С. 55-60;URL: https://top-technologies.ru/ru/article/view?id=36729 (дата обращения: 14.07.2026).