



В настоящее время беспилотные летательные аппараты (БЛА) активно используются практически во всех вооруженных конфликтах с участием армий развитых стран. Широкое внедрение таких летательных аппаратов отвечает концепциям повышения автоматизации управления подразделениями и частями с целью сокращения потерь личного состава.
Опыт боевых действий в локальных конфликтах последних лет, а также условия их ведения показали потребности повышения информационного обеспечения наземных войск тактического уровня. Исследования, проведенные в ряде стран, показывают важность обладания информацией для войсковых соединений, в том числе тактических единиц уровня взвода. Средствами, поставляющими информацию такого рода, в отличие от средств разведки с более высоким уровнем характеристик, подобно спутникам и высотным БЛА, будут являться микро-БЛА.
Микро-БЛА позволят во многих операциях исключить или значительно уменьшить боевые потери. Разведывательный комплекс, построенный на использовании микро-БЛА, будет служить для обеспечения командира на поле боя воздушной разведывательной информацией о текущей обстановке в его зоне ответственности. Использование таких комплексов позволит обходиться без заявок на разведку в вышестоящий штаб, связанный с авиационными полками, оснащенными пилотируемыми самолетами-разведчиками.
Возможное использование микро-БЛА
Таким образом, можно прогнозировать для микро-БЛА дальнейшее их использование в качестве малоуязвимого, малошумного и малозаметного средства ведения разведки. Это средство особенно эффективно при ведении боевых действий в городских условиях. Оно, помимо наблюдения обстановки, может применяться для целеуказания, обнаружения элементов химического и биологического оружия, ретрансляции сигналов радиосвязи, минирования труднодоступных объектов. Не исключена возможность группового применения микро-БЛА для подготовки операций десантирования с воздуха и морского десантирования. Возможно использование микро-БЛА в ВВС для корректировки точечных ударов с воздуха по объектам ликвидации. При этом не исключена групповая доставка микро-БЛА в зону боевых действий в специальных скоростных носителях с последующим их отделением от носителей на малых скоростях для рассредоточения над зоной нанесения воздушного удара.
Применение микро-БЛА в гражданском секторе экономики возможно для контроля радиационной обстановки в зонах АЭС, мониторинга лесных, степных массивов, труднодоступных зон земледелия, для обнаружения пожаров и содействия в их ликвидации и т.д.
Особенности аэродинамики микро-БЛА
Теория полета управляемых объектов с размерами птиц или больших насекомых, каковыми являются микро-БЛА, значительно сложнее теории пилотируемого самолета. Это является результатом того, что микро-БЛА летают в так называемой области критических чисел Рейнольдса (Rek) (рис. 1). Указанный диапазон чисел Re соответствует диапазону чисел Re авиамоделей, что позволяет использовать ряд положений теории полета летающих моделей, в том числе основы физики кризисных явлений при обтекании воздушной средой агрегатов летающих моделей.
Эта область характерна тем, что в ней все аэродинамические характеристики претерпевают резкие, малоизученные скачки, которые зависят от направления изменения скорости и угла потока. Поляра при этом перестает быть постоянной. Большинство самолетных теорий становятся неприменимыми к микрообъектам или нуждаются в серьезной корректировке. Полет управляемого микрообъекта можно сравнить с полетом самолета при скорости звука, причем микро-БЛА в критической области приходится летать постоянно.
На рис. 1 показаны кривые, отражающие зависимость коэффициента лобового сопротивления Cx от числа Re для некоторых тел. Кривые показывают, что именно в области чисел Re, характерных для летающих моделей (10 000 ÷ 200 000), происходят самые большие и резкие изменения значений Cx. Зоны критических чисел Re, соответствующие резкому увеличению Cx, и называются кризисными. Кризис сопротивления объясняется переходом пограничного слоя воздуха на поверхности тела из ламинарного состояния в турбулентное. При малых числах Re пограничный слой – ламинарный. Этот слой неустойчив и с дальнейшим ростом Re переходит в турбулентное состояние.
На рис. 1 также показан спектр обтекания шара в докризисной и закризисной зонах и соответствующее изменение коэффициента Cx. Опыт показывает, что переход ламинарного пограничного слоя в турбулентный для одного и того же тела может происходить при разных значениях чисел Re в зависимости от начальной турбулентности потока. Чем выше начальная турбулентность, тем раньше наступает кризис, тем меньше Re критическое.
Так, при ламинарном пограничном слое (рис. 1) его отрыв от поверхности тела начинается рано, обычно в месте наибольшего поперечного сечения тела, вследствие чего за ним образуется широкая завихренная полоса с пониженным давлением.
После перехода ламинарного пограничного слоя в турбулентный точка отрыва пограничного слоя отодвигается назад, к хвостовой части тела, завихренная сорванная полоса за телом становится уже, и сопротивление уменьшается.
Можно ускорить наступление кризиса, искусственно турбулизируя поток вблизи поверхности тела. Такая турбулизация пограничного слоя на крыле летательного аппарата может быть обеспечена заранее при его проектировании с учетом следующих особенностей компоновки аппарата.
Воздушные винты турбулизируют поток в области крыла, обдуваемого ими, и сильно снижают Rek, что улучшает характеристики крыла.
В летательных аппаратах, выполненных по аэродинамической схеме «утка», горизонтальное оперение, расположенное впереди крыла, турбулизирует поток на значительной части крыла, уменьшая Rek.
Свист определенной тональности и интенсивности турбулизирует поток на крыле, уменьшая Rek.
В летательных аппаратах, выполненных с использованием колеблющегося предкрылка Болдырева, предкрылок турбулизирует поток на значительной части крыла, уменьшая Rek.
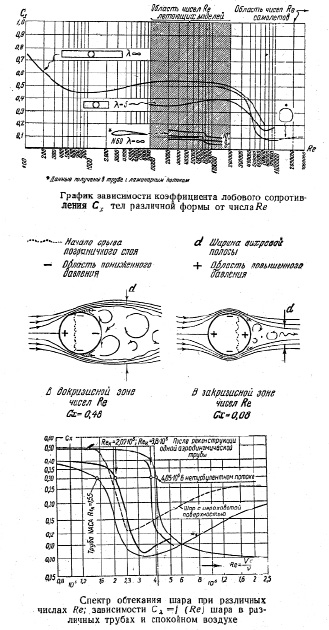
Рис. 1
Из теории полета летающих моделей известно, что уменьшение числа Re приводит к падению аэродинамического качества K фиксированных несущих поверхностей. А с уменьшением габаритных размеров летательного аппарата, равно как и чисел Re, а также его массы, подтверждается общая тенденция в авиации и природе – стремление к уменьшению удельной нагрузки на несущие поверхности, т.е. на крыло. Это уменьшение приводит к уменьшению скорости полета, а следовательно, к падению эффективности фиксированной несущей поверхности, росту удельной мощности силовой установки. Это в конечном счете приводит к необходимости отказа от фиксированных несущих поверхностей и применению подвижных несущих поверхностей, какими являются воздушный винт или комбинация подвижных поверхностей с неподвижными. В качестве такой комбинации может быть представлен предкрылок А.И. Болдырева. Эта комбинация позволяет индуцировать течение воздушного потока подвижной (колеблющейся) аэродинамической поверхностью относительно неподвижной несущей аэродинамической поверхности даже при скорости набегающего потока V = 0.
Следует заметить, что полет микро-БЛА будет протекать в основном в возмущенной атмосфере, а природа для борьбы с этим явлением использует другой источник неустановившейся аэродинамики – машущие крылья.
Таким образом, не только энергетические соображения полета микро-БЛА при малых числах Рейнольдса заставляют переоценить роль подвижных аэродинамических поверхностей для создания подъемной силы, но и состояние окружающих условий воздушной среды. Это такие условия, где аэродинамические аспекты в комплексе с миниатюрными системами навигации и управления способны адекватно реагировать на порывы ветра или турбулентности. Оперативное управление микро-БЛА возможно в таком случае только на самой простой траектории в зоне, свободной от препятствий.
Предкрылок А.И. Болдырева
Работы отечественных ученых-аэродинамиков МАИ, ХАИ, ЦАГИ, проводившиеся в довоенное время, отличались своей новизной и зачастую опережали время.
Так, А.И. Болдыревым на летающих моделях, а также во время продувок моделей в аэродинамической трубе был обнаружен новый интересный аэродинамический эффект. Установленный чуть впереди и выше носка крыла предкрылок приводился в быстрое колебательное движение, и при этом возникала сила тяги и увеличивалась подъемная сила крыла (рис. 2). Предкрылок колебался относительно своего носка вниз и вверх на углы порядка ±15°. Автором с помощниками была выполнена и продута в аэродинамической трубе модель самолета в половину натуральной величины. По полученным результатам выполнен аэродинамический расчет.
В 1946 году А.И. Болдырев завершил проект оригинального самолета с колеблющимся предкрылком. Проект рассматривался в ЦАГИ, и после положительных отзывов был заключен договор на разработку самолета в МАИ при финансовой поддержке ЦАГИ. В конце 1947 года самолет был построен в учебно-производственных мастерских (УПМ) МАИ и передан на испытания.
Самолет прошел лишь первый – стендовый этап испытаний, так как сломалась коническая шестерня привода предкрылка, и в конце 1947 года испытания прекратили.
В ходе незавершенных испытаний были получены максимальная тяга на месте около 90 кг и подтверждение, что колеблющийся предкрылок создает тягу и подъемную силу. Были выявлены большие динамические нагрузки на привод. Для окончательных натурных продувок в аэродинамической трубе с работающим предкрылком самолет был передан в ЦАГИ.
Очевидно, самолет с колеблющимся предкрылком опережал свое время и на фоне стремительного освоения реактивной техники не вызвал особого интереса в промышленности.
Последователями А.И. Болдырева в этом направлении были Б.С. Блинов, который разработал и испытал в МАИ ряд моделей с предкрылком А.И. Болдырева, а также Л. Дунц и А. Васильев.
Опыты на моделях показали, что скорость струи воздуха за предкрылком на всех режимах работы в 2,5 раза выше средней линейной скорости движения задней кромки предкрылка. Скорость полета в зависимости от нагрузки на крыло составляла 30 ÷ 80 % от скорости воздушного потока за предкрылком. Модель массой 0,82 кг отрывалась от земли при достижении двигателем мощности 0,07 л.с. при оборотах двигателя 2 900 об/мин. При мощности 0,12 л.с. модель шла в набор высоты под углом 47° к горизонту.
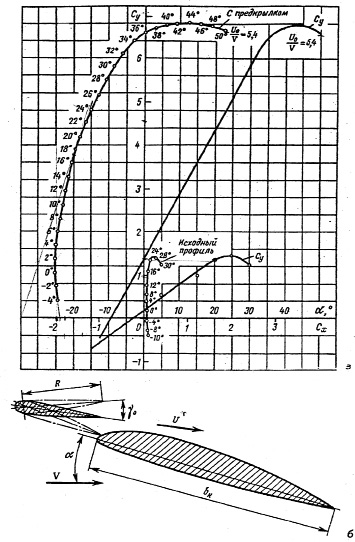
Рис. 2
Позднее за рубежом появился целый ряд интересных теоретических и экспериментальных работ, подтверждающих, что колебание аэродинамических элементов поверхности крыла, например интерцепторов, элеронов или закрылков, с частотой 60 ÷80 Гц приводит к значительному снижению индуктивного сопротивления, уменьшению интенсивности концевых вихрей и увеличению аэродинамического качества.
Самолет и микро-БЛА в воздушной среде
Отличия обтекания воздушной средой микро-БЛА и полноразмерного (пилотируемого) самолета выглядят следующим образом:
Обтекание крыла самолета происходит на закритическом режиме, поэтому желательно, чтобы ламинарность пограничного слоя сохранялась как можно дольше с целью использования малого трения при ламинарном обтекании, при этом желательно, чтобы турбулентный срыв, вызванный потерями на трение, в турбулентном потоке происходил на возможно больших углах атаки.
При ламинарном обтекании крыла микро-БЛА с числом Рейнольдса Re < 10 000 в пограничном слое может наблюдаться нежелательное докритическое состояние потока с резким увеличением аэродинамического сопротивления.
Для нескоростного полноразмерного самолета выбирают толстый профиль крыла с тупым носом.
Для микро-БЛА выбирают тонкий профиль с острым носиком.
Для скоростного полноразмерного самолета используют тонкий ламинарный профиль с очень незначительной вогнутостью средней линии, но с большим расстоянием до максимальной толщины профиля по хорде от передней кромки крыла.
Для микро-БЛА рекомендуется использовать турбулентный профиль со значительной вогнутостью средней линии профиля и малым расстоянием максимальной вогнутости профиля по хорде.
Крыло самолета должно быть по возможности гладким для уменьшения поверхности трения, особенно на носке крыла.
На носике микро-БЛА необходима незначительная шероховатость и, в некоторых случаях, даже выступ. Таким образом, поверхностное трение играет меньшую роль для микро-БЛА.
При числах Re, меньших по величине, чем числа закритической полностью турбулентной зоны, все мероприятия искусственной турбулентности крыла (шероховатость его верхней поверхности, острая передняя кромка, выступ на носике крыла и особенно турбулизатор перед носиком крыла) полезны для микро-БЛА.
Для полноразмерного самолета данные мероприятия – всегда нежелательны.
Для самолета выгодны эллиптическая и суживающаяся форма крыла в плане и форма лопасти воздушного винта, так как указанная геометрия снижает индуктивное сопротивление.
Для микро-БЛА выгоднее прямоугольная форма крыла, чтобы избежать докритического режима обтекания концов крыла и получить по возможности закритическую область чисел Re на всем крыле. При этом путем закрутки прямоугольного крыла можно получить эллиптическое распределение подъемной силы.
Современные планеры имеют максимальное аэродинамическое качество K = 25 ÷ 40, а летающие модели-парители из-за малых чисел Re на закритических режимах K = 15 ÷ 20.
Аэродинамическое качество полноразмерного планера или самолета не может быть достигнуто микро-БЛА без специальных средств механизации крыла.
На основании теоретических сведений и опыта по колеблющимся элементам несущих поверхностей в Благотворительном обществе научно-технического творчества и экологии «Ювенал» города Таганрога были построены несколько летающих моделей – прототипов микро-БЛА. Элементы колеблющегося предкрылка, как и его привод в микро-БЛА, по сравнению с самолетными агрегатами имеют минимальные инерционные массы, что открывает определенные перспективы создания и использования такого движителя для микро-БЛА. Необходимый ресурс вибропредкрылка и его привода обеспечивается использованием новых высокомодульных композитных материалов. Один из микро-БЛА рассматривается в данной работе.
Краткое описание аппарата
Техническое решение поясняется чертежами:
рис. 3 – вид аппарата сбоку;
рис. 4 – вид аппарата сверху;
рис. 5 – вид аппарата спереди;
рис. 6 – компоновка оборудования аппарата.
В соответствии с представленными чертежами аппарат состоит из следующих элементов и оборудования:
1. Крыло.
2. Колеблющийся предкрылок.
3. Обтекатель внешней оси предкрылка.
4. Обтекатель оборудования.
5. Элероны.
6. «^»-образное оперение.
7. Руль высоты и направления.
8. Траектория колебания предкрылка.
9. Видеокамера.
10. Генератор колебаний.
11. Приемник воздушного давления.
12. Датчик давления.
13. Приемник спутниковой радионавигационной системы (СРНС).
14. Бортовая миниатюрная инерциальная интегрированная навигационная система (МИИНС).
15. Аккумуляторная батарея.
16. Магнитометр.
17. Микросервопривод.
18. Передатчик.
19. Распределитель электропитания.
20. Микроавтопилот.
21. Передняя кромка крыла.
22. Бортовой вычислитель.
Микро-БЛА (рис. 3, 4, 5, 6) спроектирован по схеме «летающее крыло» трапециевидной формы 1 с вибропредкрылком 2, с «^»-образным оперением 6, установленным на верхней поверхности крыла 1. Данная аэродинамическая схема позволяет всем поверхностям управления аппаратом 5, 7, размещенным в обдуваемой потоком воздуха зоне от вибропредкрылка 2, быть эффективными на минимальных скоростях. По концам левой и правой консолей крыла установлены обтекатели 3, в которых шарнирно закреплены внешние оси вибропредкрылка 2. Внутренние оси вибропредкрылка 2 соединены с генератором колебаний 10 и закрыты обтекателем 4 оборудования.
Вибропредкрылок 2, установленный сверху и спереди передней кромки 21 крыла 1, приводится в колебательное движение генератором колебаний 10. Генератор колебаний 10 вибропредкрылка 2 может быть выполнен в виде механизма, преобразующего вращение вала привода в колебания специального рычага, соединенного с вибропредкрылком, или в виде электромагнитновибрационного привода, непосредственно воздействующего на вибропредкрылок 2. Колебания вибропредкрылка 2 индуцируют возникновение не только подъемной силы на крыле 1, но и одновременно создают тягу.
По тангажу аппарат управляется одновременным отклонением поверхностей управления 7 «вверх-вниз», по курсу – дифференциальным отклонением тех же управляющих поверхностей 7. По крену аппарат управляется элеронами 5.
Диапазон 8 колебаний вибропредкрылка находится в пределах ±16°, а частота колебаний 60 ÷ 85 Гц.
Технология изготовления оболочки аппарата основана на формовании органоткани в матрице с пропиткой в двухкомпонентном связующем с последующей укладкой до отверждения проводящих электрический ток линий, шин и соединений.
Функцию навигации и управления микро-БЛА выполняет система, в которой реализован алгоритм бесплатформенной инерциальной навигационной системы, интегрированной с приемником спутниковой радионавигационной системы.
Приемник спутниковой радионавигационной системы (СРНС) 13 выдает данные широты, долготы, высоты, скорости, путевого угла и текущего времени полета аппарата.
Бортовая миниатюрная инерциальная интегрированная навигационная система (МИИНС) 14, имея в своем составе триады инерциальных датчиков в виде микромеханических гироскопов и акселерометров, а также барометрический высотомер и трехосный магнитометр 16, выдает данные широты, долготы, высоты, баровысоты, горизонтальной скорости, вертикальной скорости, курса, крена, тангажа, угловой скорости, линейного ускорения.
Путем объединения данных МИИНС с данными приемника СРНС вырабатывается полное навигационное решение по координатам и углам ориентации полета аппарата и направляется в микроавтопилот 20.
Микроавтопилот 20 осуществляет выработку управляющих команд в соответствии с законами управления, заложенными в его вычислитель, и обеспечивает управление сервоприводами 17, контроллером силовой установки, бортовой аппаратурой 12, 13, 14, 16, 17, 18, 19, 20.

Рис. 3
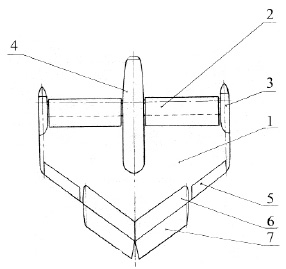
Рис. 4
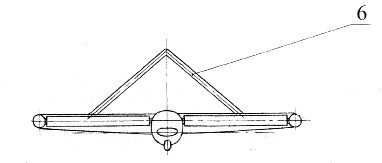
Рис. 5
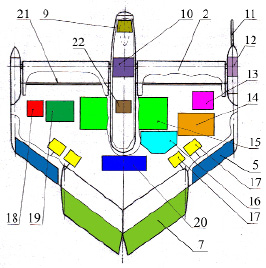
Рис. 6
В память микроавтопилота 20 заносятся поворотные пункты маршрутов полета. Каждая точка характеризуется координатами, высотой прохождения и скоростью полета. В полете микроавтопилот 20 обеспечивает выдачу в канал передачи телеметрической информации для слежения за полетом микро-БЛА.
Питание бортового оборудования 12, 13, 14, 16, 17, 18, 19, 20, целевой нагрузки и силовой установки обеспечивается аккумуляторной батареей 15.
В качестве целевой нагрузки используется миниатюрная видеокамера 9, установленная в носовой части аппарата.
Необходимые условия реализации проекта
Для реализации данного проекта и ему подобных, связанных с проектированием и строительством микро-БЛА с колеблющимися поверхностями, целесообразно провести комплекс научно-исследовательских работ следующего содержания:
1. Теоретические исследования вопросов аэродинамики полета микро-БЛА с вибропредкрылком и формирование базы программно-математического обеспечения, описывающего создание подъемной силы и тяги микро-БЛА:
- аэродинамические силы и моменты, их величина и методы определения;
- динамика полета микро-БЛА с вибрирующими несущими поверхностями;
- принципы механизации и управления полетом микро-БЛА с вибропредкрылком, зависящие от их скорости, массы, частоты и амплитуды колебаний предкрылка.
2. Экспериментально-исследовательские работы по созданию динамически подобных моделей микро-БЛА с вибрирующими несущими поверхностями различных аэродинамических компоновок.
3. Экспериментально-исследовательские работы по определению возможностей существующих силовых установок сверхмалой мощности и энергопотребления, их технологических компонентов, источников энергии применительно к микро-БЛА. Исследования вопросов использования принципиально новых силовых установок, источников энергии и компонентов.
4. Разработка общей концепции построения систем навигации и управления полетом микро-БЛА:
- принципы построения и новые методы синтеза высокоточных миниатюрных систем управления микро-БЛА;
- алгоритмы беспилотной навигации и управления полетом микрообъектов;
- программное обеспечение для проектирования и исследования систем управления и навигации микро-БЛА;
- исследование и разработка электронных, электромеханических, пневматических и других элементов микроуправления и навигации микро-БЛА;
- оценка предельных характеристик и показателей качества систем микроуправления и навигации микро-БЛА.
5. Разработка и исследование принципов организации систем связи с микро-БЛА, способов съема информации с его борта и поставки её потребителю:
- принципы построения систем связи с микро-БЛА;
- методы выбора каналов связи, систем кодирования;
- методы оценки предельных характеристик систем связи и съема информации с борта микро-БЛА;
- оценка надежности, помехозащищенности и информационной эффективности каналов связи с микро-БЛА.
6. Исследование свойств новых материалов и выработка рекомендаций по их применению для микро-БЛА.
7. Экспериментально-исследовательские работы по созданию и отработке управляемых прототипов микро-БЛА с вибрирующими несущими поверхностями оптимальных аэродинамических схем и компоновок.
Выводы
Результатом выполнения вышеназванных НИР должен стать микро-БЛА с колеблющимся предкрылком, являющийся высокоинтегрированной системой в интеллектуальной оболочке с минимизацией габаритно-массовых параметров, с обеспечением максимально возможных характеристик соответствия дальности, маневренности, управляемости, скрытности, надежности, с возможностями поставки необходимого объема и качества информации с его борта потребителю, с возможностями обеспечения ею операций в стесненных городских условиях.

Рис. 7
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. МИКРО-БЛА C ВИБРОПРЕДКРЫЛКОМ // Современные наукоемкие технологии. 2015. № 2. С. 29-39;URL: https://top-technologies.ru/ru/article/view?id=34880 (дата обращения: 11.07.2026).