



Обратный парамагнитный эффект, по существу, представляет собой выполнение третьего закона Ньютона в электродинамике сплошных сред. Поскольку тело, являющееся парамагнетиком, втягивается в область максимальной неоднородности магнитного поля, то и источник магнитного поля должен притягиваться к этому телу. Это – достаточно очевидный и реальный процесс. Сомнения появляются, если парамагнетик представляет собой бесконечную среду, чем, к примеру, может быть атмосфера. В этом случае взаимодействие среды с одним полюсом симметрично-намагниченного тела компенсируется аналогичным процессом с другим полюсом, поскольку сила взаимодействия определяется градиентом квадрата индукции магнитного поля [1]. Простейший способ создания ненулевой силы – использование тела, намагниченного неоднородно. Например, цилиндрический неодимовый магнит, который, как предполагается, намагничен однородно, с присоединенным к нему пластмассовым цилиндром (фальш-магнитом) представляет собой тело намагниченное неоднородно. Выбор такого предмета исследования понятен. Необходимо не только удостовериться, что даже в воздухе сила, действующая на такое тело, отлична от нуля, но и сравнить эту силу и с теоретическими выводами [2] и с экспериментальными результатами, полученными для такой же системы в парамагнитной жидкости [3]. Основанная на правилах подобия [4] экстраполяция результатов, полученных в парамагнитной жидкости, на случай газовой среды справедлива далеко не всегда, поскольку жидкость в отличие от воздуха в большинстве случаев практически несжимаема.
Цилиндрический неодимовый магнит диаметром 12 мм, высотой 18 мм, обладающий намагниченностью около 106 А/м и снабженный пластмассовым фальш-магнитом такого же диаметра и такой же высоты, в воздухе должен испытывать действие силы, не превышающей 10-5 Н. Это очень малое значение, и это создает дополнительные проблемы для экспериментального исследования явления, названного обратным парамагнитным явлением. Простое взвешивание здесь не подойдет, даже если при этом используются весы, обладающие очень высокой точностью. К уже полученным результатам такого взвешивания [5] нужно относиться критически, соглашаясь с очень большим числом методических и статистических погрешностей, свойственных методу.
1. Экспериментально о парамагнетизме
Взвешивание – традиционный и достаточно точный метод изучения магнитных свойств вещества. Если образец является парамагнетиком, он притягивается к источнику магнитного поля, если, наоборот, тело отталкивается от магнита, это – диамагнетик. Для решения настоящей проблемы в чистом виде этот метод почти не пригоден. Измерение в той или иной степени означает сравнение. Даже если обнаруживается, что вес магнита с фальш-магнитом, присоединенным снизу, меньше суммарного веса магнита и его фальшивого аналога, измеренных отдельно, это еще мало, что означает. Присоединяя пластмассовый цилиндр к намагниченному телу, так или иначе, вносится помеха, обусловленная не только неконтролируемым возрастанием или уменьшением массы тела, но и изменением положения центра тяжести тела, что неизбежно влияет на результат измерений. По этой же причине переворот измеряемого тела из положения «магнит сверху – цилиндр снизу» в положение «магнит снизу – цилиндр сверху», осуществляемый экспериментатором, происходит с нарушением замкнутости системы и, поэтому, не решает проблему. Такой переворот должен происходить очень медленно, автоматически и очень точно, например, при помощи часового механизма C, что позволяет учесть возникающие погрешности при обработке результатов (рис. 1).
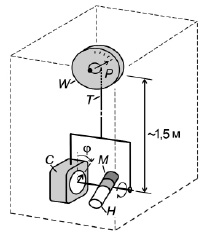
Рис. 1. Экспериментальная установка: С – часовой механизм; M – магнит; H – пластмассовый цилиндр; W – весы, T – нить
Большинство электронных весов, обладая высокой точностью измерений, имеют очень неприятный недостаток: результат измерений очень сильно зависит от того, есть рядом источник магнитного поля или его нет. Поэтому тело, вес P которого измеряется, должно быть удалено на максимально возможное расстояние от весов W
Экспериментальная зависимость изменения веса системы ∆PMH от угла поворота j оказывается далеко не идеальной и даже противоречивой (рис. 2). Это – пример зависимости, измеренный для неодимового магнита (J=106 А/м) диаметром 12 мм, высотой 18 мм, снабженный пластмассовым цилиндром высотой 18 мм. Прежде всего, в таком виде она противоречит очевидному факту: при j=ϕ0=p/2 и при j=ϕ0+p значения ∆PMH должны быть равны. Справедливости ради следует заметить, что здесь под изменением веса понимается вес системы при угле поворота j минус линейная зависимость веса, проведенная через начальное P(ϕ0) и конечное P(ϕ0+2p) значения:
 . (1)
. (1)
Обязательное заключение, следующее из рассмотрения измеренной зависимости, – существует процесс, играющий роль помехи и вносящий существенный вклад в измеряемые значения веса.
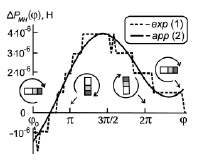
Рис. 2. Экспериментальная зависимость изменения веса от угла поворота магнита с пластмассовым цилиндром (exp) и ее аппроксимация (app)
2. Фон и дрейф
На самом деле изучается не поведение магнита в воздухе, а то, как ведет себя в воздухе магнит, с присоединенным к нему пластмассовым цилиндром. Другими словами, интерес представляет то, как влияет на магнит его пластмассовое повторение, присоединенное без зазора к одному из полюсов магнита. Это означает, что прежде чем рассуждать о том, есть ли противоречия или их нет, следует сравнить две системы, отличающиеся только присутствием фальш-магнита. Это сделать нужно обязательно, поскольку все эти мешающие воздействия, играющие роль фона, должны происходить и в том случае, если фальш-магнит не установлен. Не удивительно, что соответствующие измерения почти повторяют экспериментальные результаты, полученные для вращающегося магнита с цилиндром (рис. 3). Не обращая внимание на «ершистый» характер второй зависимости, можно догадаться, что между этими двумя наборами экспериментальных данных отличия все-таки есть и, причем, существенные. Например, максимальное изменение веса в системе без фальш-магнита заметно больше, чем с ним. Поэтому, к процедуре обработки экспериментальных результатов нужно отнестись особенно внимательно.
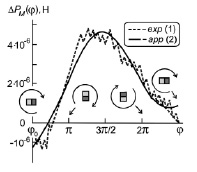
Рис. 3. Экспериментальное изменение веса магнита без пластмассового цилиндра с углом поворота и его аппроксимация
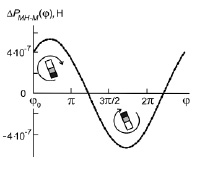
Рис. 4. Подъемная сила неоднородно намагниченного цилиндра в воздухе как функция угла поворота относительно вертикали
3. Аппроксимация и результат
Характерный размер намагниченного тела – несколько сантиметров. Магнитное поле Земли в пределах этих нескольких сантиметров с высокой степенью точности однородно. Поэтому, маловероятно, что магнитное поле Земли может втягивать или выталкивать даже столь сильно намагниченное тело, чем является неодимовый магнит. Но магнитное поле Земли может осуществлять поворот магнита, что может сыграть роль изменения веса. Важно, что зависимость такого паразитного эффекта от времени, а значит и от угла поворота должна гармонической функцией.
Даже если экспериментальная установка помещена внутрь изолированного объема, вокруг, близко или далеко, находится множество предметов, магнитные свойства которых зависят от внешнего магнитного поля, в данном случае создаваемого медленно вращающимся источником магнитного поля. Поскольку возможно обратное влияние, то и такой паразитный эффект должен быть гармонической функцией времени.
Кроме выше замеченного, есть сравнительно медленные изменения температуры, давления, влажности. Эти влияния не описываются ни синусом, ни косинусом от угла поворота, а соответствуют очень слабой функции времени, например, полиному:
 . (2)
. (2)
Если угодно, к первым трем слагаемым такой аппроксимации можно относиться как к дрейфу, а к последним двум – как к фону. Остается договориться, что считать эффектом. Дрейф нас мало интересует, на него можно вообще не обращать внимание, а фон нужно из экспериментальных результатов, полученных с фальш-магнитом, вычесть, поэтому к величине
 , (3)
, (3)
можно относиться как к взятой с обратным знаком подъемной силе, действующей на неоднородно намагниченный цилиндр (рис. 3). Здесь aj(MH) и aj(M) – коэффициенты аппроксимации (2), относящиеся, соответственно, к экспериментальным данным с пластмассовым цилиндром и без него. Оказалось, что подъемная сила все-таки есть, хотя и составляет малую величину. Есть, правда, одна неприятность, которая портит полученный результат. На самом деле, максимум подъемной силы, то есть минимум величины ∆PMH-M, появляется не при угле поворота, равном 3p/2, а чуть позже. По-видимому, это явилось следствием независимой аппроксимации экспериментальных результатов, представленных на рис. 3 и на рис. 2. Лучше после аппроксимации данных рис. 3, потребовать, чтобы максимум и минимум величины ∆PMH-M находился там, где надо.
А теперь законный вопрос: не является ли полученный результат превышением точности? Едва ли, поскольку метод измерения подъемной силы оказался, чем-то напоминающим то, что происходит в обычном радиоприемнике. Как и в этом техническом устройстве, из всего спектра шумов, дрейфа и плавания параметров аппаратуры выделено только то, что должно относиться к делу. Можно ли избавиться от фона и дрейфа? Полностью дрейф подавить едва ли удастся. Фон же можно существенно подавить, если попробовать провести аналогичные измерения не с одним магнитом, а с двумя, установленными рядом разноименными полюсами в одном направлении. Поскольку сила, действующая на источник магнитного поля определяется квадратом индукции магнитного поля, то подъемная сила, разумеется, изменится, а может даже возрастет, тогда как влияние окружения на такой странный тандем, составленный из двух магнитов, должно свестись к минимальному. Но это уже предмет другого исследования, вне цели настоящей работы.
Библиографическая ссылка
Герасимов С.А. ОБ ЭКСПЕРИМЕНТАЛЬНОМ ИССЛЕДОВАНИИ ОБРАТНОГО ПАРАМАГНИТНОГО ЭФФЕКТА В ВОЗДУХЕ // Современные наукоемкие технологии. 2014. № 10. С. 46-49;URL: https://top-technologies.ru/ru/article/view?id=34722 (дата обращения: 22.07.2026).