


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
DEVELOPMENT BIOENGINEERING MECHATRONIC MODULE FOR EXOSKELETAL HUMAN LOWER EXTREMITY

Одной из важнейших социальных проблем, стоящих в настоящее время является реабилитация и социальная защита инвалидов. При этом целью реабилитации является восстановление социального статуса инвалида, достижение им материальной независимости и его социальная адаптация. Обеспечение техническими (биоинженерными) средствами реабилитации является частью реализации комплекса мероприятий по улучшению качества жизни инвалидов. Последние достижения биоинженерии, в области создания механотерапевтических устройств, позволяют значительно повысить качество жизни инвалидов и больных с нарушениями опорно-двигательного аппарата и проходящих реабилитацию, и позволяют им стать полноправными членами общества в равной степени со здоровыми людьми. Лечение методом механотерапии базируется на использовании основной биологической функции организма – движения. Данный метод заключается в строгом дозировании физических упражнений на фоне постановки правильного дыхания [1].
Современное реабилитационное механотерапевтическое устройство (экзоскелет) представляет собой систему со сложной конфигурацией (см. рис. 1), объединяя в себе различные механические и электронные компоненты, призванные обеспечивать максимально эффективный и безопасный процесс реабилитации пациентов [1]. Работа практически любого реабилитационного устройства сводится к механическому взаимодействию реабилитационного устройства с конечностью пациента.
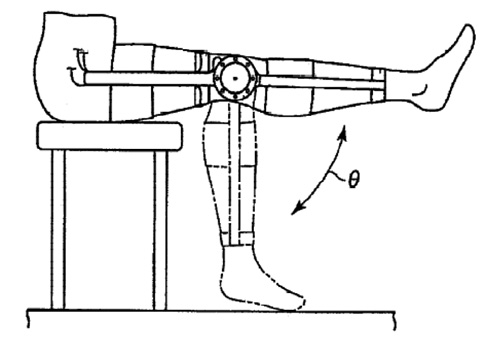
Рис. 1. Устройство для реабилитации нижних конечностей человека
Для исследования динамического поведения реабилитационного устройства была составлена его расчётная схема (см. рис. 2), где само устройство было представлено в виде многозвенника A1A2A3, лежащего в координатной плоскости OXY, и состоящего из двух подвижных звеньев, центры масс которых находятся в точках O1 и O2 соответственно.
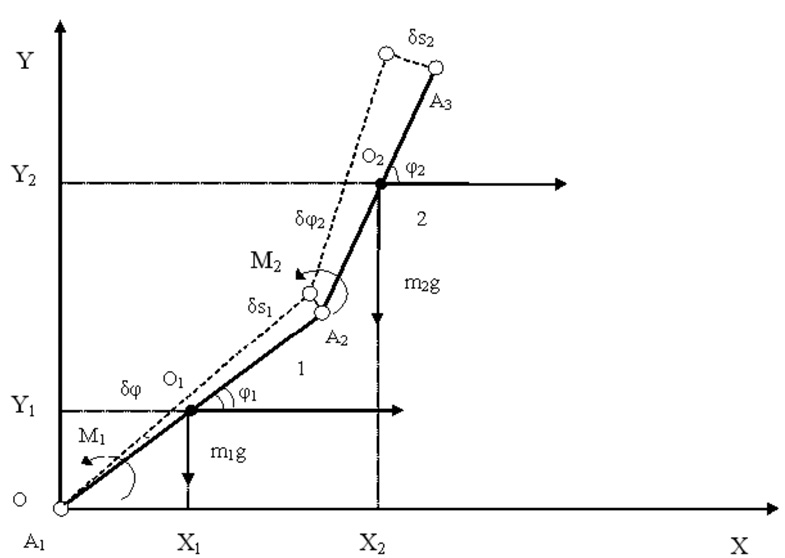
Рис. 2. Расчетная схема устройства для реабилитации нижних конечностей человека
Динамические уравнения движения системы были разработаны на основе уравнений Лагранжа 2-го рода [2] и имели следующий вид:
– уравнение для обобщенной координаты φ1:
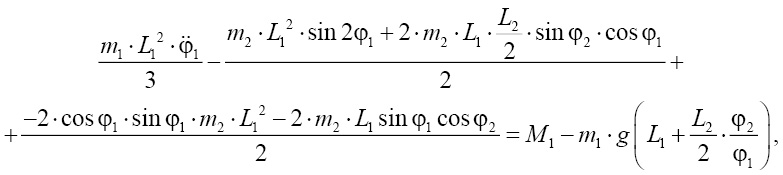 (1)
(1)
– уравнение для обобщенной координаты φ2:
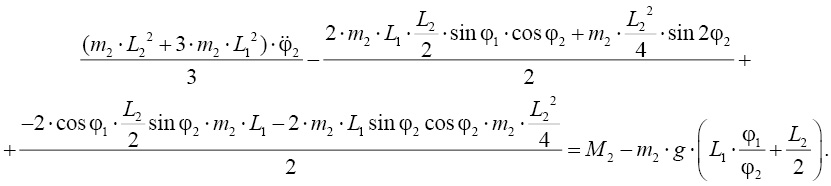 (2)
(2)
Здесь m1 и m2 – массы звеньев 1 и 2 соответственно; L1 и L2 –длины звеньев; FТ1 и FТ2 – силы тяжести; М1 и М2 – крутящие моменты электродвигателей приводов
На основе полученных выражений, было проведено исследование динамически рассматриваемой системы в среде Mathcad 2000. Вычисления проводились при постоянном 1 и переменных 2 значениях крутящего момента M1.
Результаты моделирования представлены на рис. 3.
При переменных значениях угла поворота φ2 динамические характеристики принимали вид, представленный на рис. 4.
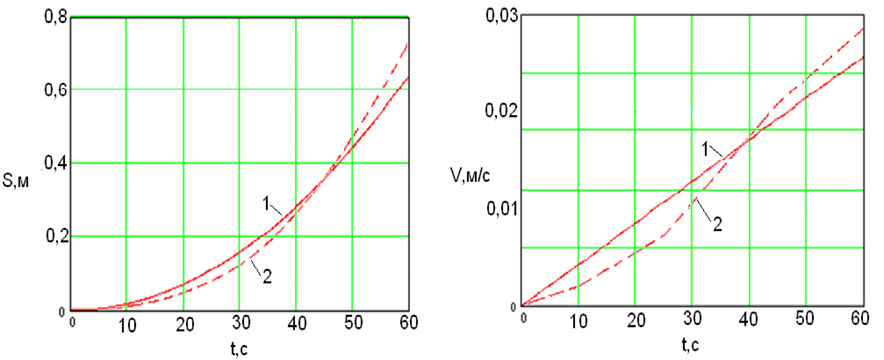
Рис. 3. Временные зависимости перемещения S и скорости звена V центра масс звена 2
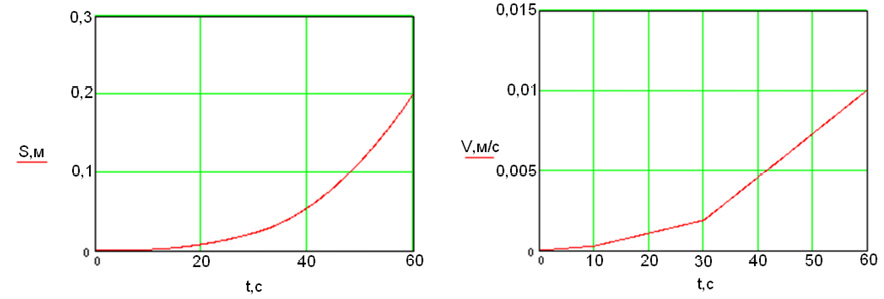
Рис. 4. Временные зависимости перемещения S и скорости звена V центра масс звена 2 при переменных значениях момента M2 и угла поворота φ2
Выводы
1. В исследуемом механотерапевтическом устройстве, движение каждого звена влияет на движение всех остальных.
2. Для установления параметров, определяющих рабочую область движения исполнительного органа устройства, а также форму траекторий движения, которые должна обеспечивать реабилитационная система, необходимо оптимизировать ее параметры и синтезировать алгоритмы работы и законов управления движением исполнительных звеньев.
Работа выполнена в рамках реализации Федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009-2013 годы.
Библиографическая ссылка
Рукавицын А.Н., Яковлев И.А. МЕХАНОТЕРАПЕВТИЧЕСКОЕ РЕАБИЛИТАЦИОННОЕ УСТРОЙСТВО ДЛЯ НИЖНИХ КОНЕЧНОСТЕЙ ЧЕЛОВЕКА // Современные наукоемкие технологии. 2013. № 9. С. 108-110;URL: https://top-technologies.ru/en/article/view?id=33242 (дата обращения: 23.06.2026).