



Ранее нами была рассмотрена самопередвигающаяся грунтопроходческая машина – подземный проходческий робот (ППР), предназначенный для проведения подземных горизонтальных скважин малого диаметра [1].
К рабочему органу подземного проходческого устройства предъявлялось требование складываемости, заключающееся в том, что, выполняя свои основные функции, рабочий орган обрабатывает забой на полное сечение (вчерне), а в сложенном состоянии – может пройти по сечению, ограниченному обсадными трубами или специально образованными стенками скважины (в свету).
За разрушающим органом в структурной схеме ППР следует крепильщик, который закрепляет стенки образуемой скважины. Сечение забоя уменьшается и чтобы робот мог выйти, ему необходимо сложить режущий орган (рисунок).
Решение этой проблемы было достигнуто установкой режущих элементов определенным образом. Два породоразрушающих инструментов установлены симметрично относительно продольной оси машины. Каждый из инструментов имеют асимметричный относительно собственной оси корпус. Именно благодаря этой асимметрии рабочий орган получает возможность складывания, т.е. уменьшение в поперечном сечении и свободного выхода из закрепленной скважины.
Режущие элементы установлены на сателлиты простой планетарной передачи. Каждая точка лезвий инструмента описывает траекторию в виде гипоциклоиды. Было также установлено, что траектории зависят от передаточного числа планетарной передачи, т.е. от числа зубьев центрального колеса и сателлита.
Если рассмотреть эти траектории при z1 = 36 и z2 = 16 (таблица), то можно видеть, что из-за такого расположения режущих коронок забой обрабатывается не полностью. Оставшиеся в середине части опадают. Можно также увидеть когда лезвия складываются и убедиться в возможности вывода робота из забоя.
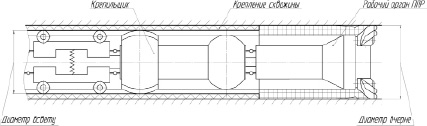
Структурная схема ППР
Таблица
Траектории движений лезвий
|
Траектория движения 1 лезвия |
Траектория движения 2 лезвия |
|
|
|
|
Траектория движения 3 лезвия |
Траектория движения 3 лезвий вместе |
|
|
|

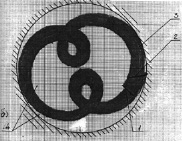

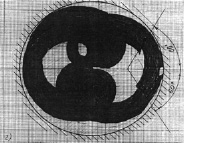
Для того чтобы за один оборот водила обрабатывать максимально возможную площадь забоя, каждое лезвие инструмента установлено таким образом, чтобы не было наложений их траекторий, при этом должна получаться скважина круглого сечения.