


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
PROBLEM OF SELF-OSCILLATING MODES SWITCHING IN NONLINEAR CONTROL SYSTEMS

Исследование колебаний в кольцевых областях является достаточно сложной задачей теории нелинейных колебаний [1]. В статье рассматривается принцип переключения автоколебательных режимов, основанный на синтезе инвариантных многообразий [2]. Инвариантность многообразия означает, что траектории, начинающиеся на этом многообразии, остаются на нем при  . Если многообразие гладкой системы – замкнутое и компактное, то траектории системы неограниченно продолжаемы на нем [3]. Из существования и единственности решения задачи Коши следует, что траектории системы, начинающиеся вне инвариантного многообразия, не могут его пересекать при
. Если многообразие гладкой системы – замкнутое и компактное, то траектории системы неограниченно продолжаемы на нем [3]. Из существования и единственности решения задачи Коши следует, что траектории системы, начинающиеся вне инвариантного многообразия, не могут его пересекать при  . Следовательно, если многообразие является границей некоторой области, то траектории системы, начинающиеся внутри этой области, будут оставаться в ней при
. Следовательно, если многообразие является границей некоторой области, то траектории системы, начинающиеся внутри этой области, будут оставаться в ней при  .
.
Автоколебания являются следствием собственных внутренних свойств системы. При этом амплитуда и частота колебаний не будут зависеть от начальных условий процесса. Автоколебания возникают только при наличии нелинейности. Возбуждение автоколебательного режима означает формирование устойчивого предельного цикла в пространстве состояний системы.
С изменением некоторых основных параметров нелинейной системы могут происходить бифуркации, вызывающие перестройку фазовых траекторий.
В статье [4] исследован механизм бифуркации на примере ритмов Ламэ. Одной из прикладных задач динамики биологических ритмов является управление геометрией профиля ритма, что, в частности, связано с управлением амплитудами процессов Ламэ [2]. Типовая классификация ритмов определяется связной системой осцилляторов с определенным типом доминирующей нелинейности. Рассматривается задача построения многосвязной системы, передача управляемых сигналов в которой осуществляется по 2n-каналам. Решение задачи приводит к определению слоев, ограниченных замкнутыми инвариантными многообразиями.
В результате бифуркации ритм Ламэ переключается с одного автоколебательного режима на другой. Это соответствует изменению свойства устойчивости предельных циклов.
В работе [5] получена зависимость между отношением площадей областей, ограниченных предельными циклами соответствующих подсистем, и амплитудами управляемой системы.
В данной работе в структуру управляющих функций вводятся нелинейности более высокого порядка. Это позволяет существенно увеличить гибкость управления с целью изменения размеров области, ограниченной устойчивым предельным циклом, в отношении регулирования характеристик установившегося колебательного процесса.
Постановка задачи
Рассмотрим вложенные в R2n гладкие многообразия:  , взаимное расположение которых в пространстве определим как
, взаимное расположение которых в пространстве определим как
 , (1)
, (1)
где  Границы областей
Границы областей  зададим уравнениями
зададим уравнениями

Для выполнения условия (1) достаточно, чтобы 
 Нижняя и верхняя границы каждой кольцевой области являются нечетно-мерными многообразиями, гомеоморфными сферам.
Нижняя и верхняя границы каждой кольцевой области являются нечетно-мерными многообразиями, гомеоморфными сферам.
Рассмотрим задачу синтеза автоколебаний на слое  ,
,  при
при  :
:

где  – вектор состояния пространства системы управления;
– вектор состояния пространства системы управления;  – внутренние функции управления;
– внутренние функции управления;  – обменные функции управления,
– обменные функции управления,  .
.
Решение задачи стабилизации колебаний на слое сводится к получению условий инвариантности, асимптотической устойчивости верхней или нижней границы кольцевой области в фазовом пространстве системы [6]. При m = 1 управлять размерами областей можно с помощью регулирования соответствующих амплитуд колебательных подсистем. При m > 1 в качестве управляющих параметров во многих задачах следует рассматривать соотношения площадей внутренних областей, ограниченных инвариантными кривыми.
Параметры управления и стабилизация колебаний в кольце
Структуру управлений определим следующим образом:
1) внутрисистемное управление первой подсистемы

2) внутрисистемное управление второй подсистемы

3) внутрисистемное управление i-той подсистемы, i = 1, 2

4) межсистемное управление

Рассмотрим функцию  . Данная функция знакопостоянна, как на множестве, примыкающем к ее поверхности уровня изнутри, так и в некотором δ-слое, прилегающем к границе извне. Запишем условия инвариантности для границ слоя:
. Данная функция знакопостоянна, как на множестве, примыкающем к ее поверхности уровня изнутри, так и в некотором δ-слое, прилегающем к границе извне. Запишем условия инвариантности для границ слоя:
 .
.
Равенство выполняется тогда и только тогда, когда вектор X принадлежит поверхности  . Условие инвариантности будет выполняться только для одной из поверхностей уровня функции F(X). Выполним подстановку и необходимые преобразования. Условия на параметры управлений примут вид:
. Условие инвариантности будет выполняться только для одной из поверхностей уровня функции F(X). Выполним подстановку и необходимые преобразования. Условия на параметры управлений примут вид:
- для внутрисистемного управления первой подсистемы

- для внутрисистемного управления второй подсистемы

- для внутрисистемного управления i-той подсистемы, i = 1, 2

- для межсистемного управления
 ,
,

 ,
,
 при условии, что
при условии, что  ,
,
 .
.
При этих параметрах управляющих функций границы  , j = 4, кольцевой области инвариантны для траекторий, с начальными условиями, определенными на множествах
, j = 4, кольцевой области инвариантны для траекторий, с начальными условиями, определенными на множествах

и  соответственно.
соответственно.
Стабилизирующие управления с требуемыми свойствами могут быть реализованы в нескольких случаях, связанных между собой переключением автоколебательных режимов с помощью смены знака перед параметрами управления [4].
Исследуем поведение системы (2) на следующих областях:
 ,
, 
где j = 1, 2, 3,
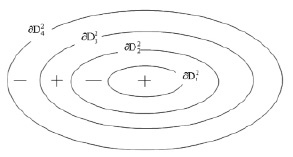
Рис. 1. Знакоопределенность полной производной функции F(X)
1. Для траекторий системы, начинающихся внутри области  , полная производная будет определенно положительной в области
, полная производная будет определенно положительной в области  и определенно отрицательной на множестве
и определенно отрицательной на множестве  (рис. 1). Следовательно, траектории системы, начинающиеся внутри множества
(рис. 1). Следовательно, траектории системы, начинающиеся внутри множества  , притягиваются к границе
, притягиваются к границе  . В силу инвариантности поверхности
. В силу инвариантности поверхности  далее траектории ее не пересекают, оставаясь внутри области, ограниченной
далее траектории ее не пересекают, оставаясь внутри области, ограниченной  . Траектории скручиваются от границы
. Траектории скручиваются от границы  к
к  и вовнутрь слоя с притяжением к границе
и вовнутрь слоя с притяжением к границе  .
.
Траектории системы, начинающиеся внутри множества  , притягиваются к границе
, притягиваются к границе  и скручиваются от границы
и скручиваются от границы  в
в  .
.
2. Определим поведение полной производной функции на движения системы (2) после изменения знака перед коэффициентами функций управления. В этом случае полная производная будет отрицательной на множестве  и положительной в области
и положительной в области 
 . Таким образом, траектории системы, начинающиеся внутри множества
. Таким образом, траектории системы, начинающиеся внутри множества  , стягиваются в начало координат. Траектории системы, начинающиеся внутри множества
, стягиваются в начало координат. Траектории системы, начинающиеся внутри множества  , притягиваются к границе
, притягиваются к границе  и скручиваются от границы
и скручиваются от границы  в
в 
Траектории системы, начинающиеся внутри множества  , скручиваются от границы
, скручиваются от границы  и притягиваются к границе
и притягиваются к границе  в
в  .
.
Во внутренней и внешней δ – окрестности  поверхности
поверхности  ,
,  нет ω и α – предельных точек, как и на самой поверхности, нет α – предельных точек. Согласно теореме В.И. Зубова об асимптотической устойчивости инвариантных множеств с учетом описанного поведения траекторий можно сделать вывод, что множество
нет ω и α – предельных точек, как и на самой поверхности, нет α – предельных точек. Согласно теореме В.И. Зубова об асимптотической устойчивости инвариантных множеств с учетом описанного поведения траекторий можно сделать вывод, что множество  является областью притяжения для
является областью притяжения для  .
.
Численное моделирование. Переключение режимов автоколебаний
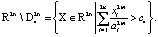
Геометрически в R2 слой определяют концентрически расположенные предельные циклы. Внутренним предельным циклом является граница  , внешним –
, внешним –  , i = 1, 2, 3. В одном случае интегральные трубки описывают выход на режим устойчивых автоколебаний с параметрами предельных циклов
, i = 1, 2, 3. В одном случае интегральные трубки описывают выход на режим устойчивых автоколебаний с параметрами предельных циклов  ,
,  , в другом случае – с параметрами циклов
, в другом случае – с параметрами циклов  ,
,  . На рис. 2 интегральная кривая скручивается с трубки внешнего предельного цикла
. На рис. 2 интегральная кривая скручивается с трубки внешнего предельного цикла  к трубке внутреннего предельного цикла
к трубке внутреннего предельного цикла  . На рис. 3 наблюдается переключение режимов автоколебаний, в результате которого внутренний предельный цикл
. На рис. 3 наблюдается переключение режимов автоколебаний, в результате которого внутренний предельный цикл  становится неустойчивым. Интегральная кривая скручивается от границы
становится неустойчивым. Интегральная кривая скручивается от границы  и притягивается к поверхности
и притягивается к поверхности  . Внешний предельный цикл
. Внешний предельный цикл  приобретет устойчивость (рис. 4).
приобретет устойчивость (рис. 4).
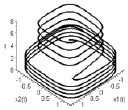
Рис. 2. Устойчивая внутренняя граница слоя
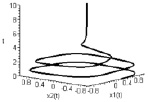
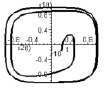
Рис. 3. Потеря устойчивости внутренней границей слоя
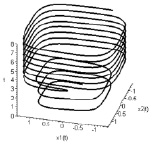
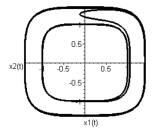
Рис. 4. Устойчивая внешняя граница слоя
Заключение
Полученные в работе системы управления со стабилизацией на слое могут быть использованы в задачах биомедицинских технологий, при решении задач управляемого движения шагающих машин. Принцип переключения между устойчивыми режимами позволит варьировать размеры области стабилизации, определять характеристики колебаний.
Библиографическая ссылка
Полянина А.С. ЗАДАЧА ПЕРЕКЛЮЧЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ РЕЖИМОВ В НЕЛИНЕЙНЫХ СИСТЕМАХ УПРАВЛЕНИЯ // Современные наукоемкие технологии. 2021. № 2. С. 52-57;URL: https://top-technologies.ru/en/article/view?id=38493 (дата обращения: 02.08.2026).
DOI: https://doi.org/10.17513/snt.38493