



Введение
В настоящее время системы захвата движения находят применение в различных областях, таких как кинематография, спортивная аналитика, виртуальная реальность, робототехника и транспортные системы [1]. Использование множества инерциальных датчиков на одном объекте предъявляет высокие требования к обработке данных в реальном времени. Особенно остро эта проблема стоит в системах контроля состояния водителя транспортных средств, где задержки в обработке информации могут повлиять на безопасность управления [2].
Разработке аппаратно-программных средств параллельной обработки данных посвящены работы Владимирова С. С., Данилюка Е. И., Янковского А. А. и др. [3-5]. Алгоритмам для параллельных вычислений – работы Овчаренко О. И., Полякова В. С., Мунермана В. И. и др. [6-8]. Анализ патентной документации показывает устойчивый интерес к методам параллельной обработки данных. В патентах US10289447B1 и US11734009B2 [9; 10] предложен метод планирования параллельных задач, при котором данные разделяются на независимые пары и распределяются между потоками без конфликтов. Патент US11036471B2 [11] описывает методы группировки данных для эффективной параллельной обработки с использованием хеш-функций для равномерного распределения нагрузки. Наибольший интерес представляет патент US12149257B2 [12], в котором предложена схема обработки сенсорных данных с использованием параллельных цифровых фильтров, что позволяет уменьшить задержки и повысить производительность по сравнению с последовательной обработкой. В патенте US10672095B2 [13] описан метод увеличения пропускной способности за счёт параллельной передачи данных через несколько интерфейсов, что аналогично использованию в настоящей работе двух независимых UART-каналов. Среди компаний, занимающихся разработкой средств регистрации параметров движения человека, следует отметить Xsens (Нидерланды), Nansense (США), Rokoko (США). Данные коммерческие решения обеспечивают высокую точность, однако их стоимость варьируется от 300 тыс. до 2,5 млн руб., что делает их недоступными для массового применения в бюджетных проектах и специализированных научных исследованиях.
Анализ современных публикаций показал, что основным недостатком, сдерживающим массовое внедрение многопроцессорных вычислительных систем, является сложность адаптации алгоритмических и программных средств под конкретные задачи. Существующие однопроцессорные архитектуры, как правило, не справляются с нагрузкой при масштабировании количества датчиков, что приводит к потерям данных или снижению частоты опроса.
Цель исследования – повышение быстродействия системы регистрации параметров движения человека за счёт параллельной регистрации и обработки данных от микроэлектромеханических (MEMS) устройств при заданных стоимостных ограничениях (10–15 тыс. руб.).
В рамках исследования разработана методика построения системы захвата движения на базе доступной элементной базы, позволяющая достичь требуемых характеристик быстродействия при жёстких стоимостных ограничениях. Основное внимание уделено практической реализации и экспериментальной верификации предложенной методики.
Материалы и методы исследования
Исходная система регистрации движений [2] включала 15 инерциальных датчиков MPU-6050. Каждый датчик имеет два встроенных адреса. Для расширения адресного пространства и сопряжения всех датчиков с микроконтроллером ATmega2560 использовался мультиплексор TCA9548A. Информация, поступающая в микроконтроллер с датчиков, обрабатывалась с помощью фильтра Калмана и затем передавалась на устройство сбора информации (рис. 1а). Основным недостатком данной архитектуры являлась последовательная обработка данных: центральный процессор последовательно опрашивал и обрабатывал показания каждого датчика. При частоте опроса 100 Гц это приводило к перегрузке вычислительных ресурсов и риску потери пакетов данных.
Предлагаемая архитектура с параллельной обработкой.
Для устранения узких мест предложена модернизация системы на базе многомашинной вычислительной системы (рис. 1б). В новой архитектуре используются два микроконтроллера ATmega328P, работающих параллельно и независимо друг от друга.
Принцип работы модернизированной системы:
1. Микроконтроллер 1 обслуживает первую группу датчиков (8 шт.) через свой мультиплексор.
2. Микроконтроллер 2 обслуживает вторую группу датчиков (7 шт.) через свой мультиплексор.
3. Оба микроконтроллера работают одновременно, выполняя идентичные алгоритмы: опрос датчиков, фильтрацию Калмана и подготовку данных.
4. Обработанная информация передается на устройство сбора по двум независимым каналам (UART).
Такая организация позволяет распределить вычислительную нагрузку и сократить время цикла обработки пропорционально количеству вычислителей.
Предлагаемая методика построения системы включает следующие этапы:
1. Разделение датчиков на группы по критерию минимизации времени опроса (равномерное распределение нагрузки).
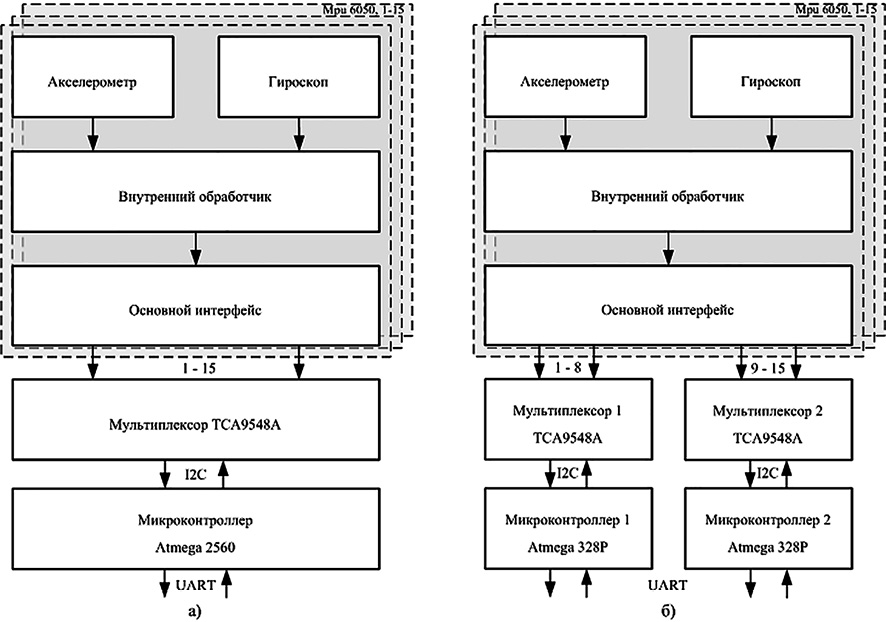
Рис. 1. Структурная схема системы регистрации движений: (а) исходная (однопроцессорная); (б) модернизированная (многомашинная) Источник: составлено авторами по результатам данного исследования
Таблица 1
Основные технические характеристики микроконтроллеров
|
Наименование |
Atmega 2560 |
Atmega 328P |
|
Ядро |
AVR |
AVR |
|
Разрядность, бит |
8 |
8 |
|
Тактовая частота, МГц |
16 |
16 |
|
Объём памяти, Flash, Кб |
258,048 |
32,256 |
|
Объём памяти, RAM, Кб |
8 |
2 |
|
Объём памяти, EEPROM, Кб |
4 |
1 |
|
Портов ввода-вывода |
54 |
23 |
|
Портов ввода-вывода с АЦП |
16 |
6 |
|
Доля в себестоимости устройства, % |
33,8 |
10 |
Источник: составлено авторами по результатам данного исследования.
2. Декомпозиция монолитного программного кода на функционально независимые подпрограммы с учётом ограничений по объёму памяти целевых микроконтроллеров.
3. Организация параллельной работы вычислителей с передачей данных по двум независимым UART-каналам.
Оригинальность предложенной методики состоит в возможности реализации параллельного опроса 15 MEMS-датчиков на бюджетной элементной базе без снижения частоты опроса, что ранее не достигалось в конфигурациях с аналогичными аппаратными ограничениями. Для обоснования выбора элементной базы проведён сравнительный анализ микроконтроллеров ATmega2560 (используемого в исходной системе) и ATmega328P (предлагаемого для модернизации). Основные технические характеристики представлены в таблице 1.
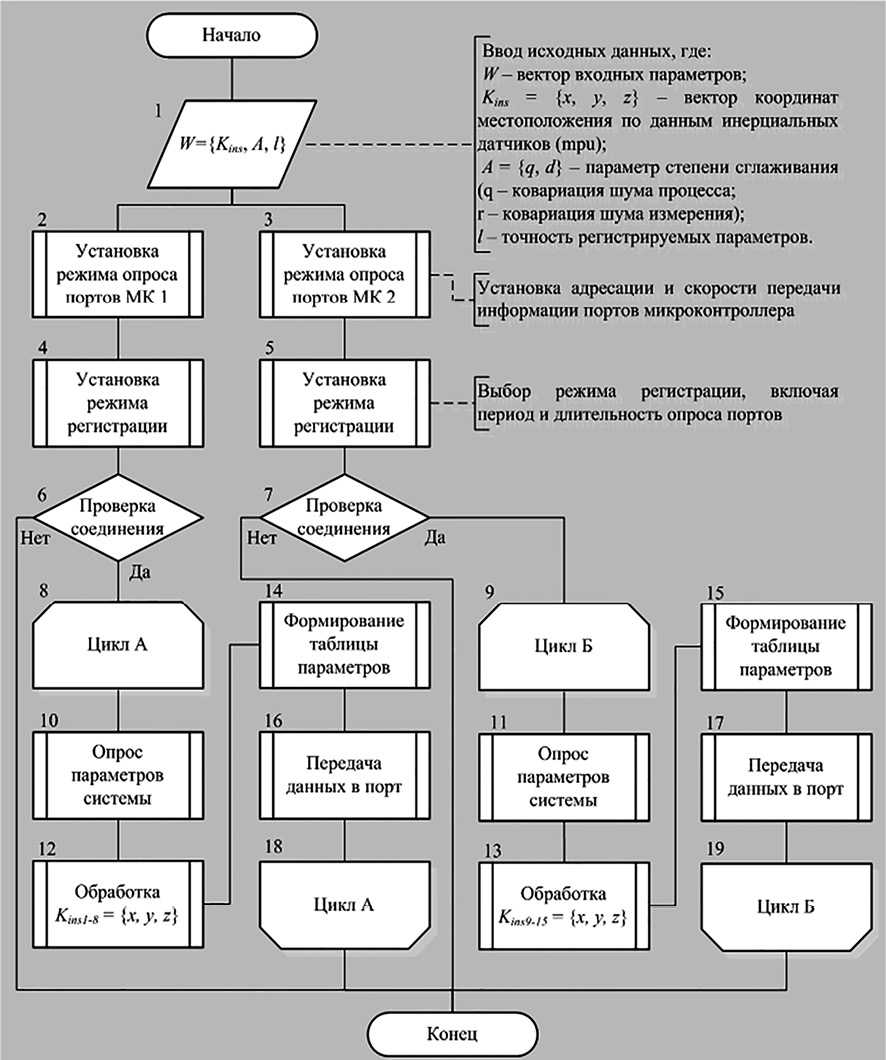
Рис. 2. Алгоритм работы системы захвата движений человека Источник: составлено авторами по результатам данного исследования
При учёте общей стоимости изготовления устройства снижение себестоимости составит 13,8%. С учётом дополнительных компонентов (второй мультиплексор, разъёмы) общее снижение себестоимости оценивается в 8,3%.
На рисунке 2 представлен алгоритм работы модернизированной системы захвата движения. Исходная программа [14], разработанная для системы регистрации и обработки данных, имела объём 32,8 Кб. Это превышает максимально допустимый объём памяти для загрузки в микроконтроллер ATmega328P, что делает невозможным её прямое использование в новой архитектуре.
В результате декомпозиции были получены две подпрограммы объёмом 32,13 Кб для микроконтроллера 1 и 32,02 Кб для микроконтроллера 2 [15]. Суммарный объём кода составил 64,15 Кб.
Таблица 2
Сравнительные результаты быстродействия систем
|
Параметр |
Конфигурация А |
Конфигурация Б |
|
Среднее время цикла обработки, мс |
115,62 |
67,39 |
|
Максимальное время цикла, мс |
116,81 |
68,0 |
|
Частота обновления данных, Гц |
100 (стабильно) |
100 (стабильно) |
|
Объём занимаемой Flash-памяти, Кб |
32,8 |
64,15 (суммарно) |
Источник: составлено авторами по результатам данного исследования.
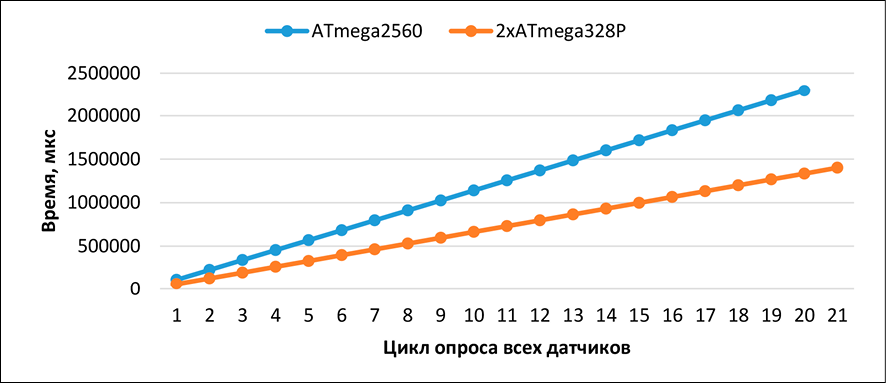
Рис. 3. Отношение времени цикла обработки исходной конфигурации к модернизированной Источник: составлено авторами по результатам данного исследования
Результаты исследования и их обсуждение
Для верификации эффективности предложенного подхода было проведено сравнение двух конфигураций системы: конфигурация А (один микроконтроллер ATmega2560), последовательный опрос датчиков, монолитная программа. Конфигурация Б (два микроконтроллера ATmega328P), параллельная работа, распределённая обработка.
В ходе сравнения измерялось время полного цикла обработки (опрос всех датчиков, фильтрация, подготовка данных к передаче). Проведено 100 замеров для каждой конфигурации при частоте опроса датчиков 100 Гц. Результаты представлены в таблице 2.
Предложенная архитектура позволила сократить среднее время цикла обработки на 41,7% (со 115,62 до 67,39 мс). Это достигнуто за счёт параллельной работы двух микроконтроллеров: каждый обрабатывает только свою группу датчиков, что исключает простои, характерные для последовательного опроса. На рисунке 3 представлен график, демонстрирующий отношение времени цикла обработки исходной конфигурации (ATmega2560) к модернизированной (2×ATmega328P).
Максимальное время цикла в новой конфигурации не превышает 68 мс, что гарантирует стабильную работу на частоте 100 Гц без потери данных. В исходной системе пиковые нагрузки приближались к значению в 116 мс.
Заключение
В результате выполненного исследования разработана и экспериментально подтверждена методика построения многомашинной системы захвата движения человека на базе MEMS-датчиков, обеспечивающая повышение быстродействия при жёстких стоимостных ограничениях (10–15 тыс. руб.). Предложенная архитектура на основе двух микроконтроллеров ATmega328P позволяет реализовать параллельную регистрацию и обработку данных от 15 инерциальных датчиков MPU-6050.
Экспериментально подтверждено, что переход от последовательной к параллельной обработке позволяет сократить среднее время цикла на 41,7% (с 115,62 до 67,39 мс) при сохранении стабильной частоты опроса 100 Гц. При этом прирост производительности достигнут исключительно за счёт архитектурных решений, без увеличения тактовой частоты микроконтроллеров, что подтверждает эффективность предложенного подхода.
Экономическая эффективность разработки подтверждена снижением себестоимости устройства на 13,8% в части затрат на микроконтроллеры и на 8,3% в общей структуре затрат.
Предложенная методика может быть воспроизведена при создании аналогичных бюджетных систем, требующих обработки данных от множества датчиков в реальном времени.
Конфликт интересов
Финансирование
Библиографическая ссылка
Сарайкин А.И. ПОВЫШЕНИЕ БЫСТРОДЕЙСТВИЯ СИСТЕМЫ ЗАХВАТА ДВИЖЕНИЯ ЧЕЛОВЕКА ЗА СЧЁТ ПАРАЛЛЕЛЬНОЙ РЕГИСТРАЦИИ И ОБРАБОТКИ ДАННЫХ ОТ МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ УСТРОЙСТВ // Современные наукоемкие технологии. 2026. № 3. С. 68-73;URL: https://top-technologies.ru/ru/article/view?id=40707 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.40707