



Введение
Регулярный контроль сварных соединений, металлоконструкций и трубопроводов методами неразрушающего контроля является важнейшей задачей промышленной безопасности, позволяя предотвращать аварии и сокращать затраты на ремонт оборудования. Среди различных методов ультразвуковой контроль (УЗК) занимает ведущее положение благодаря своей доступности, высокой чувствительности к дефектам и возможности исследования объектов без их повреждения. Дополнительными преимуществами метода являются безопасность для персонала, универсальность применения к различным материалам и возможность проведения контроля без остановки производственного процесса.
Современные исследования в области ультразвукового неразрушающего контроля демонстрируют устойчивую тенденцию к интеграции методов машинного обучения, прежде всего глубоких нейросетевых архитектур. Существенный вклад в систематизацию современных подходов внесли S. Cantero-Chinchilla, P.D. Wilcox и A.J. Croxford, представившие обширный обзор ключевых методологических вызовов и перспектив применения глубокого обучения в задачах детекции дефектов. Авторы подчеркивают, что именно нейросетевые методы обеспечивают качественный переход от классических алгоритмов к более устойчивому распознаванию сложных ультразвуковых сигналов, что формирует основу для дальнейшего развития автоматизированных диагностических систем [1]. Различные типы нейронных сетей, включая сверточные (CNN), рекуррентные (RNN) и гибридные архитектуры CNN-LSTM, успешно применяются для анализа ультразвуковых сигналов в неразрушающем контроле, обеспечивая высокий уровень классификации дефектов и достоверную оценку их характеристик [2].
На текущий момент наибольшее число исследований в области обработки данных УЗК посвящено CNN, поскольку такие архитектуры позволяют эффективно извлекать пространственные признаки из ультразвуковых изображений. Сравнение классических алгоритмов и глубоких моделей проведено в работе J. Ye, S. Ito и N. Toyama. Авторы показали, что увеличение глубины сети улучшает разделение дефектных и бездефектных областей при анализе неоднородных ультразвуковых изображений [3]. Высокая результативность CNN подтверждается и в задачах дефектоскопии бетона. Так, R. Slonski, K. Schabowicz и A. Krawczyk продемонстрировали, что сверточные сети позволяют уверенно выделять дефектные участки в сложной внутренней структуре материала, улучшая качество интерпретации получаемых изображений. Y. Wang и соавт. развили этот подход, показав, что многоуровневые CNN обеспечивают более точную локализацию повреждений и формирование детальных карт дефектов, что делает метод применимым для инженерной оценки состояния конструкций [4, 5]. В свою очередь, для диагностики склеенных неоднородных структур D. Smagulova, V. Samaitis и E. Jasiuniene адаптировали архитектуру VGG-16 к анализу C-scan изображений. Модель сохраняет высокую точность классификации даже при изменении амплитуды и кривизны поверхности, что свидетельствует о хорошей обобщающей способности при работе с композитными материалами [6].
Помимо анализа статических изображений, сверточные сети успешно применяются для обработки сигналов. Для задач анализа дифракционных ультразвуковых сигналов Q. Fei и др. предложили архитектуру, которая совмещает классификацию A-scan сигналов с сегментацией связных областей. Такой подход автоматизирует выделение дефектных зон и повышает точность оценки размеров трещин благодаря встроенным механизмам подавления шумов [7]. Дальнейшее развитие этого направления демонстрируют Y. Shen и соавт., которые показали, что одномерные сверточные сети эффективно оценивают размеры трещин по сигналам направленных волн: в сравнении с многослойным персептроном 1D-CNN дают существенно меньшую ошибку как в моделируемых, так и в экспериментальных данных, особенно при изменении параметров возбуждения [8]. Аналогичную эффективность CNN демонстрируют в задачах количественной оценки коррозии анкерных болтов, где G. Han и соавт. применили многомасштабную CNN архитектуру. Учет многомодовой структуры ультразвуковых волн позволил повысить точность классификации уровней коррозии и корректнее дифференцировать степени повреждения исследуемого материала [9].
Наконец, помимо композитных материалов сверточные нейросети успешно применяются и для мониторинга других сложных объектов. Например, M.A. Islam и G. Olm сравнили эффективность CNN и YOLOv5 для автоматического распознавания дефектов железнодорожного полотна. Они показали, что CNN лучше справляется с бинарной классификацией участков рельсов, тогда как YOLOv5 обеспечивает более точную детекцию отдельных дефектов, что важно для повышения надежности железнодорожной инфраструктуры [10]. В совокупности эти исследования демонстрируют, что CNN-архитектуры надежно выделяют пространственные признаки в условиях сложной структуры материалов, неоднородности ультразвуковых полей и высокого уровня шумов. Благодаря этому сверточные сети фактически стали базовым инструментом автоматизированной дефектоскопии в широком спектре задач УЗК.
Несмотря на широкое применение сверточных сетей в анализе пространственных признаков, для задач, требующих учета временных зависимостей, более эффективными оказываются рекуррентные архитектуры. В частности, F. Zhang, L. Wang и W. Ye разработали многоуровневую LSTM-модель, которая по данным, смоделированным для алюминиевых пластин, уверенно восстанавливает ключевые параметры включений: точность определения их радиуса превышает 98 %, а горизонтального положения – 95 %. Такие результаты подтверждают способность LSTM надежно извлекать диагностически значимые признаки непосредственно из временной последовательности сигналов [11]. Эффективность рекуррентных моделей проявляется и в задачах обнаружения ламинационных дефектов в углеродных композиционных материалах: предложенная F. Zhang и соавт. архитектура, обученная на синтетических данных, позволяет прогнозировать положение и размеры дефектов при использовании всего одного передатчика и приемника, что уменьшает требования к аппаратуре и облегчает промышленное внедрение [12]. В задачах, где требуется не только выявить дефект, но и точно определить его форму и пространственное расположение, Y. Wu и др. применили сочетание вейвлет-разложения и GRU. Использование вероятностных тепловых карт совместно с пороговой сегментацией обеспечивает точную оценку площади и трехмерных координат внутренних повреждений, что делает этот подход особенно полезным для количественной диагностики сложных материалов [13]. Это позволяет заключить, что рекуррентные архитектуры позволяют не только выявлять дефекты, но и оценивать их геометрию с высокой точностью, даже при ограниченной аппаратной конфигурации. Таким образом, для задач УЗК, где критично учитывать динамику сигналов и точное пространственное положение повреждений, LSTM и GRU модели представляют собой практически применимый и надежный инструмент.
Развитие методов временного анализа закономерно привело к появлению гибридных моделей, сочетающих временные и пространственные признаки, что обеспечивает более полное представление о структуре дефектов. W. Qu и соавт. предложили архитектуру, объединяющую сверточные нейронные сети, двунаправленные рекуррентные сети и механизм внимания, которая одновременно обрабатывает данные в временной и частотной областях, выявляя сложные спектральные и динамические особенности сигналов и достигая высокой точности классификации (97,7 %), что позволяет исследовать взаимосвязь пространственных и временных признаков в ультразвуковых сигналах [14]. В рамках схожей концепции Y. Sun и др. использовали CNN для выделения пространственных признаков и LSTM для учета временной структуры сигналов, применяя метод для обнаружения мелких повреждений на алюминиевых пластинах и точного определения их координат даже при высоком уровне шума [15]. Похожий подход реализован Y. Guo и соавт. в архитектуре FCN-GRU, способной одновременно выявлять дефекты, определять их тип и локализовывать их, что позволяет анализировать сложные пространственно-временные закономерности распространения ультразвуковых волн в 3D-композитных структурах с высокой пространственной неоднородностью [16]. В совокупности эти результаты демонстрируют, что гибридные подходы, объединяющие пространственный и временной анализ, обеспечивают более точную и надежную диагностику сложных материалов по сравнению с методами, использующими только один тип признаков, при этом рассмотренные исследования показывают эффективность сочетания сверточных и рекуррентных компонентов для точной локализации, устойчивости к шуму и анализа сложных структур.
Помимо архитектурных улучшений, важной задачей является решение проблемы недостатка размеченных данных. В этом направлении J. Rus и R. Fleury предложили подход, в котором для генерации больших обучающих выборок используются реконфигурируемые образцы, позволяющие моделировать разнообразные дефекты и условия измерений. Такой метод обеспечивает эффективную интерпретацию сложных ультразвуковых сигналов нейросетями, позволяя сохранять высокую точность классификации и локализации дефектов даже при ограниченном и разнородном наборе данных [17]. Этот подход повышает устойчивость модели к вариациям сигналов и особенностям экспериментальной установки, что особенно важно для практических задач дефектометрии в условиях недостатка данных для обучения.
Таким образом, существующие исследования гибридных архитектур часто фокусируются на отдельных аспектах обработки данных и преимущественно используют LSTM-слои для временного анализа. В данной работе предлагается комплексный подход, включающий полный цикл обработки – от предобработки сырых ультразвуковых сигналов до интерпретации предсказаний модели. В качестве рекуррентного компонента используется GRU-архитектура, так как она обладает большей вычислительной эффективностью при сохранении способности к моделированию временных зависимостей, что особенно важно для промышленного внедрения.
Цель исследования – разработка гибридной модели на основе CNN и GRU нейронных сетей для автоматизированной классификации повреждений по данным ультразвукового неразрушающего контроля, которая предназначена для определения наличия или отсутствия дефекта в исследуемом объекте.
Материал и методы исследования
Методологической основой данного исследования послужила ранее рассмотренная гибридная архитектура CNN-GRU, которая описывает общий подход к обучению модели [18]. Как демонстрирует анализ, данная комбинация позволяет эффективно обрабатывать ультразвуковые сигналы за счет совместного использования CNN для выделения локальных пространственных признаков и GRU для анализа временных зависимостей. Для практической реализации данного подхода необходимо детально рассмотреть структуру модели и процесс ее обучения.
Архитектура предложенного решения включает два ключевых компонента: этап предобработки исходных данных и саму нейросетевую модель. Рассмотрим первый компонент – подготовку данных для обучения. Качество предобработки напрямую влияет на сходимость обучения и итоговую точность модели, поскольку исходные сигналы УЗК требуют нормализации и специальной подготовки для эффективного обучения.
В качестве исходных данных использовались наборы сигналов ультразвукового неразрушающего контроля из исследования I. Virkkunen и соавт. в объеме 21 420 примеров [19]. Данные представлены в виде пакетов файлов, содержащих:
− необработанные сигналы (файлы .bins),
− описание формата данных (файлы .meta),
− метаданные с характеристиками дефектов (файлы .json),
− разметки с указанием наличия/отсутствия дефектов (файлы .labels).
Общий массив данных был разделен на обучающе-валидационную (19 500 образцов) и тестовую (1920 образцов) части. Обучающе-валидационная выборка дополнительно разделена в пропорции 80/20 на обучающую (15 600 образцов) и валидационную (3900 образцов) подвыборки.
Подготовка данных для обучения модели проводилась с использованием модифицированного генератора из данной работы. Алгоритм предобработки состоял в следующем: необработанные сигналы загружаются и преобразуются в формат float32. Для каждого сигнала выполняется стандартизация путем вычитания среднего значения и деления на стандартное отклонение. Целевые переменные загружаются из файлов .labels, при этом для обучения модели используется только первый столбец, соответствующий бинарной классификации. Затем данные формируются в батчи размером 60 образцов со случайным перемешиванием. Такая размерность обеспечила оптимальный баланс между эффективностью использования вычислительных ресурсов и устойчивостью процесса обучения.
Сформированные таким образом данные непосредственно подаются на входной слой нейросетевой модели. На первом этапе двухблочная CNN часть выполняет глубокое извлечение пространственных признаков из исходных данных. Первый сверточный блок использует 128 фильтров с ядром 5×5 для выделения базовых особенностей сигнала, после чего следует слой с 96 фильтрами с ядром 3×3 для выявления более сложных паттернов. После каждого сверточного слоя применяется функция активации ReLU для введения нелинейности, а завершает блок операция макс-пулинга, которая значительно уменьшает пространственную размерность данных, сохраняя наиболее информативные признаки.
Второй сверточный блок последовательно уменьшает количество фильтров до 64 и 48 соответственно, сохраняя размер ядра 3×3, что позволяет модели сфокусироваться на наиболее релевантных признаках и снизить вычислительную сложность. После операций свертки и ReLU активацией следует финальный макс-пулинг, который дополнительно сжимает пространственное представление данных. По завершении CNN части данные проходят операцию преобразования формы (reshape), которая подготавливает их для рекуррентной обработки, преобразуя пространственное представление в последовательное.
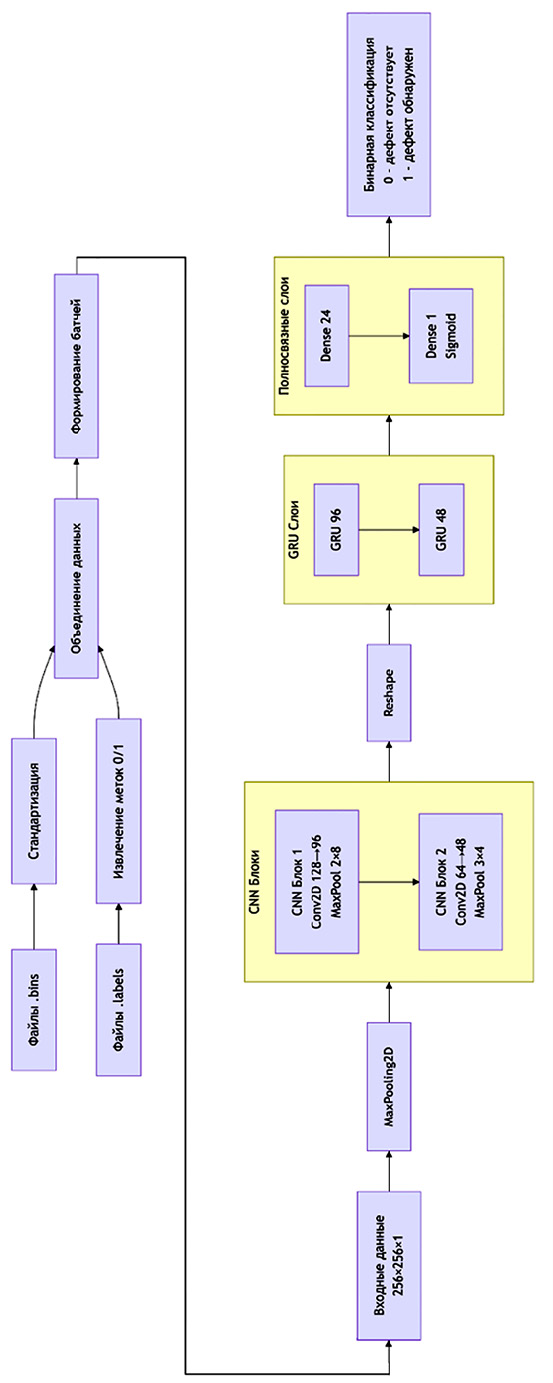
Рис. 1. Архитектура CNN-GRU модели Примечание: составлен авторами по результатам данного исследования
GRU-часть модели принимает эти преобразованные данные и анализирует временные зависимости между извлеченными признаками. Первый GRU-слой с 96 нейронами обрабатывает входную последовательность, возвращая полную последовательность скрытых состояний, что позволяет сохранить временной контекст для следующего слоя. Второй GRU-слой с 48 нейронами агрегирует полученную информацию, возвращая только финальное скрытое состояние. Оба слоя используют дропаут и рекуррентный дропаут с вероятностью 0,2 для предотвращения переобучения и повышения устойчивости модели.
Завершающая часть архитектуры состоит из полносвязных слоев, которые выполняют окончательную классификацию. Слой с 24 нейронами и ReLU активацией дополнительно преобразует признаки, извлеченные GRU слоями. Финальный выходной слой с одним нейроном и сигмоидной функцией активации производит бинарную классификацию, выдавая вероятность наличия дефекта в диапазоне от 0 до 1, где значения ближе к 1 указывают на высокую уверенность модели в присутствии дефекта в анализируемых данных. Архитектура предложенного решения представлена на рис. 1.
Обучение выполнялось на процессоре Apple M3 с 18 ГБ RAM с использованием Neural Engine без внешнего GPU. Общее время обучения составило порядка 50 мин.
Процесс обучения модели был реализован с использованием фреймворка TensorFlow и высокоуровневого Keras API. Модель компилировалась с оптимизатором RMSprop со скоростью обучения 0,0001 и функцией потерь binary_crossentropy, что оптимально для задачи бинарной классификации дефектов.
Для управления процессом обучения применялся комплекс callback-функций: EarlyStopping с интервалом в 10 эпох для предотвращения переобучения, ReduceLROnPlateau с коэффициентом 0,5 и интервалом 5 эпох для адаптивного снижения скорости обучения, а также ModelCheckpoint для сохранения лучших весов модели и TensorBoard для визуализации метрик обучения.
Для комплексного мониторинга производительности модели была реализована система логирования, которая сохраняла метрики обучения после каждой эпохи, создавала визуализации предсказаний и распределения вероятностей, а также отслеживала основные показатели качества модели. Весь процесс обучения сопровождался сохранением истории обучения, финальных весов модели и детальной статистики производительности для последующего анализа.
Результаты исследования и их обсуждение
В ходе исследования была реализована гибридная CNN-GRU модель для бинарной классификации дефектов. Несмотря на установленный лимит в 100 эпох, обучение завершилось досрочно на 75-й эпохе благодаря срабатыванию ранней остановки, что свидетельствует о достижении модели оптимальной точки обучения. На обучающей выборке модель достигла точности 99,74 %, тогда как на валидационной – 99,77 %. На независимой тестовой выборке точность составила 99,48 % при 5 ошибках классификации, что составляет 0,69 % от общего числа примеров.
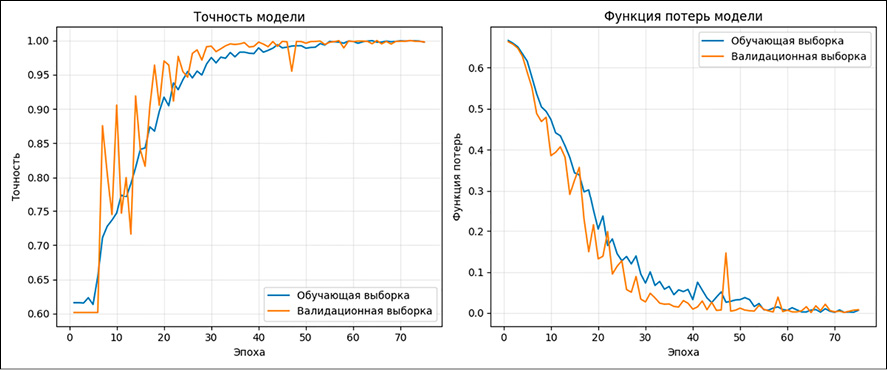
Рис. 2. Графики обучения модели: точность и функция потерь Примечание: составлен авторами по результатам данного исследования
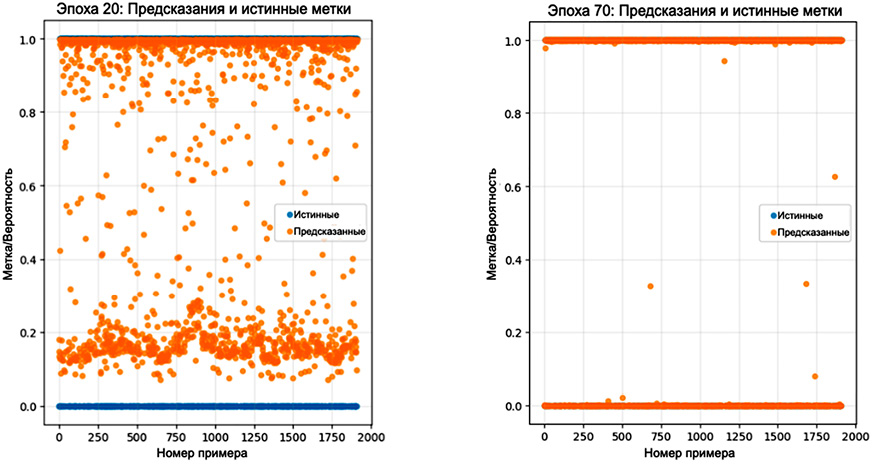
Рис. 3. Сравнение распределения предсказаний на разных эпохах обучения Примечание: составлен авторами по результатам данного исследования
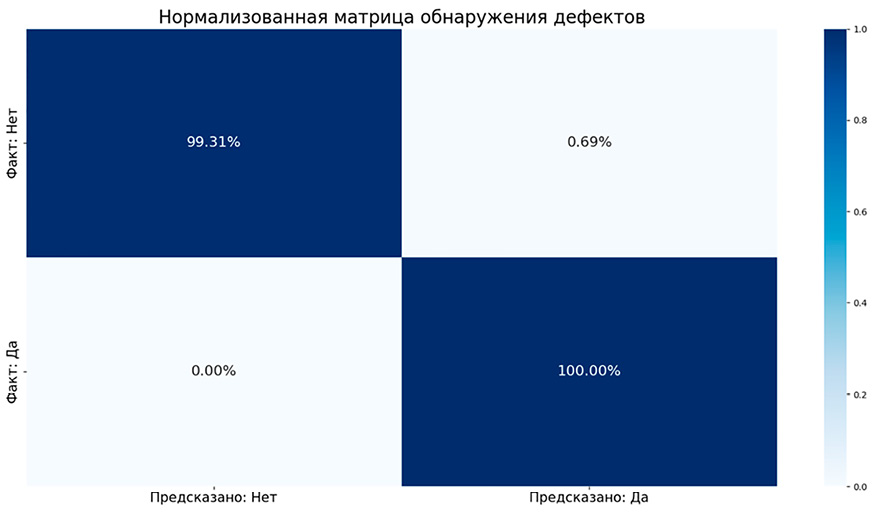
Рис. 4. Нормализованная матрица обнаружения дефектов Примечание: составлен авторами по результатам данного исследования
Для оценки эффективности обучения модели были построены графики изменения основных метрик, результаты которых приведены на рис. 2. Их анализ позволяет оценить процесс сходимости модели. На графике точности наблюдается рост с небольшими колебаниями как на тренировочных, так и на валидационных данных. Несмотря на их наличие, наблюдается устойчивая тенденция к улучшению метрик. Значения тренировочной и валидационной точности остаются близкими на протяжении всего обучения. График функции потерь показывает общую тенденцию к уменьшению данного значения.
На рис. 3 можно наблюдать динамику распределения предсказаний на тестовой выборке на различных эпохах (в данном случае приведены изображения для 20-й и 70-й эпохи соответственно).
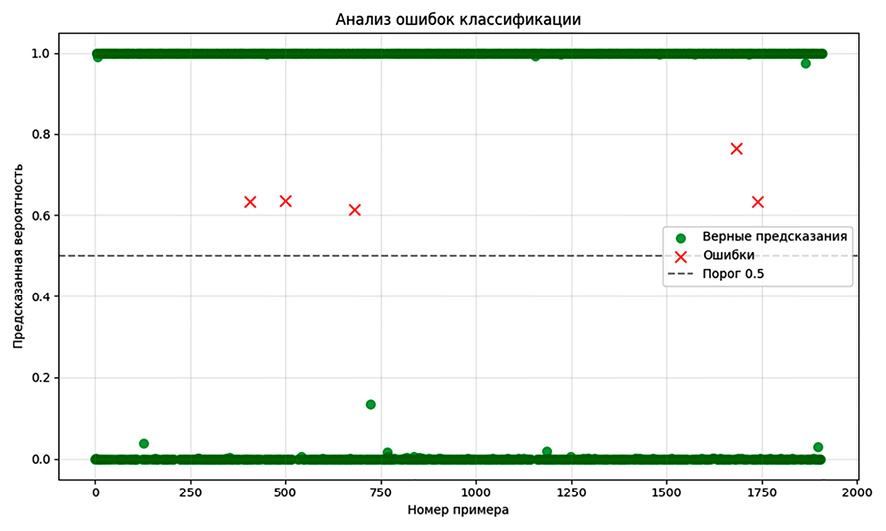
Рис. 5. Анализ ошибок классификации Примечание: составлен авторами по результатам данного исследования
На начальных этапах обучения наблюдается широкое распределение вероятностей, но по мере обучения вероятности смещаются к крайним значениям 0 и 1, что свидетельствует о возрастающей уверенности модели в предсказаниях о факте наличия или отсутствия дефекта.
Нормализованная матрица обнаружения дефектов, изображенная на рис. 4, показывает, что все имеющиеся ошибки модели являются ложноположительными. При этом модель демонстрирует абсолютную чувствительность к реальным дефектам, не пропуская ни одного из них, что указывает на оптимизацию под задачу максимизации вероятности обнаружения дефектов.
Распределение предсказанных вероятностей на рис. 5 показывает уверенность, с которой модель верно идентифицирует дефекты, а также демонстрирует характер ее ошибок.
На графике можно заметить, что все ложноположительные срабатывания характеризуются высокой уверенностью модели, достигая значений в диапазоне 0,6–0,8. Такие показатели при ошибочных предсказаниях могут говорить о том, что в данных присутствуют особенности, которые модель последовательно, но неправильно ассоциирует с наличием дефектов. Данная особенность может быть связана с наличием артефактов, возникающих из-за специфики подготовки данных или особенностей измерений. Такие артефакты могут иметь визуальное сходство с реальными дефектами, что вводит модель в заблуждение. При этом распределение большинства правильных классификаций в районе крайних значений 0 и 1 свидетельствует о высокой эффективности модели и подтверждает ее способность к четкому разделению классов.
Несмотря на то, что в рамках данной работы сравнение с другими моделями не проводилось, опубликованные исследования демонстрируют преимущество подобных гибридных решений над отдельными CNN или GRU (LSTM), что подтверждает целесообразность выбранного подхода.
Заключение
Таким образом, разработанная гибридная CNN-GRU модель продемонстрировала высокую эффективность для задачи идентификации дефектов по данным ультразвукового неразрушающего контроля, достигнув точности 99,48 % на независимой тестовой выборке. Данный подход успешно сочетает анализ пространственных и временных характеристик сигналов, обеспечивая точное обнаружение повреждений при минимальном количестве ложных срабатываний – всего 0,69 % ошибок классификации. Ключевым преимуществом модели является стабильность результатов: на валидационных данных достигнута точность 99,77 %, что согласуется с показателями на тестовой выборке. Полученные результаты свидетельствуют о потенциале использования разработанной модели в промышленных системах мониторинга оборудования и могут рассматриваться как основание для ее возможного включения в библиотеки алгоритмов обработки сигналов и автоматической детекции дефектов.
Перспективы дальнейших исследований включают снижение доли ложноположительных срабатываний и усовершенствование функциональности модели для оценки геометрических размеров и уровня критичности дефектов.
Конфликт интересов
Библиографическая ссылка
Иванов Д.А., Кондратов Д.В. ГИБРИДНАЯ МОДЕЛЬ ДЛЯ ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКИ ДАННЫХ УЛЬТРАЗВУКОВОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ // Современные наукоемкие технологии. 2025. № 12. С. 69-77;URL: https://top-technologies.ru/ru/article/view?id=40606 (дата обращения: 23.07.2026).
DOI: https://doi.org/10.17513/snt.40606