



Динамику разборки подвижного соединения труб условно можно разложить на подготовительный (I), основной (II) и заключительный (III) этапы.
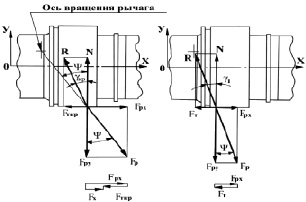
I этап демонтажа соединения труб характеризуется выбором всех люфтов в монтажном ключе (МК) и разъемной втулке (РВ) при наклоне рукоятки МК на угол ψ (рис. 1) с началом разжатия стального запорного кольца (СЗК). До полного разжатия СЗК детали соединения подвергаются переменным нагрузкам и соответствующим суммарным упругим деформациям.
Данная система сил обусловлена двумя факторами: силой, приложенной к рычагу МК на оси его вращения Fр, и моментом МР, с плечом рычага l [1]:
МР = Fрl.
Сила Fр имеет две составляющие, направленные вдоль осей OX и OY:
Fрx = Fрsin ψ; Fрy = Fрcos ψ. (1)
Вертикальная составляющая Fру через раструб соединения передаётся на грунт, вызывая соответствующую силу трения раструба с грунтом [2]:
FТ = Fруf1, (2)
где f1 – коэффициент трения стали о грунт (его критическое значение, вызывающее сдвиг раструба, достигает максимальной величины при fкр).
а б
Рис. 1. Схема силового нагружения раструба соединения рычагом МК: а – в начале рабочего хода рычага; б – в конце рабочего хода рычага
Сила трения FТ направлена противоположно сдвигающей силе Fрх и частично или полностью уравновешивает ее. При этом результирующая горизонтальная осевая сила Fх способна влиять на условие равновесия раструба:
Fх = Fрх – FТ. (3)
Так, в начале рабочего хода рычага МК (рис. 1, а), когда угол наклона вектора силы Fр к вертикали ψ превышает γкр, сдвигающая сила Fрх > FТкр, а сила Fх > 0 (критическое значение силы трения FТкр = Fруfкр согласно (2) лишь частично уравновешивает движущую силу Fрх).
В заключительной части рабочего хода рычага МК (рис. 1, б) угол ψ находится в пределах ψ = γ1 ≤ γкр. Движущая сила Fрх уравновешивается противоположно направленной «докритической» силой трения раструба о грунт
Fрх = FТ,
а результирующая осевая сила Fх становится равной нулю
Fх = Fрх – FТ = 0.
Подставив в равенство (3) выражения (1) и (2), получим
Fх = Fр(sin ψ – f1cos ψ).
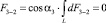
Для обозначения сил, возникающих в сопрягающихся элементах (деталях) соединения, присвоим этим элементам соответствующие номера: манжете – 1, СЗК – 2, раструбу – 3, микропористой подкладке – 4, РВ – 5.
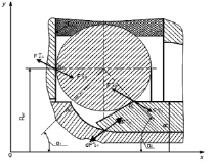
К концу I этапа демонтажа элементарная сила dF3-2 на элемент dL СЗК заменяется элементарной силой давления РВ dF5-2, направленной от точки С в сторону центра СЗК. При этом инициируется движение элемента СЗК в сторону действия элементарной силы dF5-2, направленной под углом α2 к оси ОХ. Эти элементарные силы образуют уравновешенную систему сходящихся сил, а СЗК становится неподвижно зажатым между манжетой, раструбом и РВ (рис. 2).
Все элементарные силы равномерно распределены по длине СЗК, их суммирование выражается простыми определёнными интегралами. При этом суммарная осевая сила воздействия манжеты на СЗК F1-2 будет равна
 (4)
(4)
Аналогично выражению (4) запишем остальные суммарные осевые силы:
 (5)
(5)
 (при α3 = 90°). (6)
(при α3 = 90°). (6)
Рис. 2. Схема нагружения соединения труб на I этапе демонтажа: 1 – манжета; 2 – СЗК; 3 – раструб; 4 – микропористая подкладка; 5 – РВ
С учётом закона о равенстве действия и противодействия сил получим
dF2-1 = dF1-2;  (7)
(7)
dF2-5 = dF5-2;  (8)
(8)
dF2-3 = dF3-2;
 (при α3 = 90°). (9)
(при α3 = 90°). (9)
С учетом (6) условие равновесия СЗК в ходе I этапа можно записать как
F1-2 = F5-2. (10)
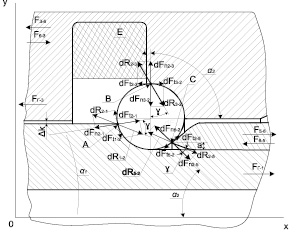
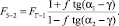
Рис. 3. Схема нагружения соединения в статической стадии II этапа демонтажа
В начале II этапа демонтажа (рис. 3) осевая сила F3-2 со стороны раструба на СЗК уже более не действует. Однако с появлением со стороны РВ осевой силы F5-2 СЗК подготовлено к началу движения из радиусной выемки раструба, но ещё удерживается элементарными силами трения dFt3-2, пропорциональными силам нормального давления СЗК на выемку раструба
dFt3-2 =f•dFn2–3, (11)
где f – коэффициент трения скольжения СЗК по поверхностям деталей 1, 3, 5.
В статической стадии II этапа демонтажа соединения силы нормальной реакции раструба dFn2-3 и силы трения dFt3-2 дают равнодействующую элементарную реакцию dR3–2, действующую на элемент dL СЗК, отклоненную от нормали к контактирующим поверхностям на угол трения γ = arctg f.
Силы трения на СЗК со стороны манжеты и РВ аналогичны (11):
dFt1-2 = fdFn2–1; dFt2-5 = f dFn2–5. (12)
Суммарная осевая сила воздействия манжеты на СЗК с учетом (12) равна

Используя выражения (5) и (6), получим суммарные осевые силы воздействия на СЗК со стороны РВ и раструба

 (13)
(13)
где α1, α2 и α3 – углы наклона нормалей к контактирующим поверхностям в точках А, С и В соответственно, относительно продольной оси трубопровода.
В формуле (13) при α3 = 90° каждой элементарной нормальной силе dFn3-2 соответствует уравновешивающая её, противоположно направленная сила. Эти силы не дают суммарной осевой составляющей. Все элементарные силы трения dFt3-2 направлены в одну сторону параллельно продольной оси трубопровода и, суммируясь, дают осевую равнодействующую силу трения Ft3-2, равную F3-2.
Оценим меру влияния сил трения в местах взаимодействия СЗК с деталями 1, 3 и 5 на потребную осевую силу F5–2 действующую на кольцо со стороны РВ. Для элемента dL СЗК уравнения равновесия, составленные с учётом коэффициента трения f и отклонения равнодействующих элементарных реакций dR от нормали в точках взаимодействия на угол трения γ имеют вид
по оси ОX:
dR 1-2 cos (α1 – γ) – dR5-2 cos (α2 – γ) + dR3-2 sin γ = 0; (14)
по оси ОY:
dR1-2 sin (α1 – γ) + + dR5-2 sin (α2 – γ) – dR3-2cos γ =0. (15)
В дальнейших алгебраических преобразованиях при любых сочетаниях элементарных и суммарных сил взаимодействия деталей 1, 2, 3 и 5 можно использовать следующие зависимости [3]
dFn = dR cos γ; dFt = f dFn = tg γdFn;
dFt = dR sin γ; (16)
dFr = dR sin (α – γ); dFа = dR cos (α – γ);
 (17)
(17)
где α – угол наклона нормали к продольной оси трубопровода в точке взаимодействия деталей, определяющих радиальную составляющую силу dFr и осевые составляющие сил dFа или Fа.
Полагая, что осевое усилие воздействия грунта на манжету FГ-1 от одной ветви трубопровода равно усилию воздействия грунта на раструб FГ-3 от другой ветви (FГ-1 = FГ-3) [4], выполнив в (14) и (15) алгебраические преобразования с учетом зависимостей (16)–(17), окончательно получим формулу для определения суммарной осевой силы трения F3-2, действующей на СЗК со стороны раструба
 (18)
(18)
Сдвиг СЗК относительно радиусной выемки раструба одновременно характеризуется сдвигом демонтируемой трубы. При этом РВ, воздействуя на СЗК с осевой движущей силой F5-2, преодолевает суммарную осевую силу F3-2 и силу натяжения трубопровода FГ-1 (или FГ-3), что выражается уравнением
F5-2 = F3-2 + FГ-1.
С учетом (18) зависимость для определения F5-2 можно выразить как
 (19)
(19)
Для определения величин F3-2 и F5-2 необходимо знать углы α1 и α2.
Принимая значения радиуса (r) сечения СЗК и зазора (Δk) между манжетой и раструбом (определяется по проекции на ось OY расстояния от верхней кромки радиусного выступа манжеты до центра сечения СЗК), среднее значение угла α1 можно определить выражением

Величины f, γ и α1 определены законом трения скольжения и заданными при проектировании конкретными размерами деталей соединения «Раструб».
Влияние величины угла α2 сказывается на взаимодействии СЗК с нагруженными деталями демонтируемого соединения. Так, согласно (19), с увеличением значения угла α2 осевая движущая сила F5-2 возрастает. Среднее значение угла α2 можно определить выражением

где а – координата точки С, совпадающей с точкой сопряжения окружности элемента dL кольца с образующей рабочего конуса РВ.
Когда суммарная сила трения Ft3-2 и осевая сила F3-2 под действием возрастающего усилия монтажника и осевой движущей силы F5-2 достигают критических значений (f = fкр), статическая стадия II этапа демонтажа завершается полной готовностью к сдвигу СЗК (вместе с РВ и манжетой) относительно контактной точки В к кромке радиусной выемки раструба.
Динамическая стадия нагружения II этапа демонтажа начинается с разжатия СЗК, когда его средняя плоскость выходит за пределы радиусной выемки раструба и продолжает движение влево от поперечной плоскости E раструба (рис. 4). При этом изменяется распределение сил по дуге СЗК в местах его взаимодействий с РВ, меняются углы наклона нормалей и векторов нормальных сил в местах взаимодействий с манжетой α1 и раструбом α3 [5].
На стадии динамического нагружения радиальные составляющие всех действующих на СЗК сил вызывают его радиальные перемещения Δr, а появляющаяся со стороны раструба осевая составляющая – осевые перемещения Δх. С увеличением радиальных перемещений СЗК возрастают радиальные усилия его разжатия и движущая суммарная осевая сила F5-2.
При разжатии СЗК на него действует векторный силовой комплекс:
со стороны РВ – отклонённый от нормали на угол трения вектор равнодействующей силы  (результирующий вектор сил
(результирующий вектор сил  и
и  );
);
со стороны раструба – отклонённый от нормали на угол трения вектор силы  (его действие учитывается на пятне контакта в сечении кольца);
(его действие учитывается на пятне контакта в сечении кольца);
со стороны манжеты – отклонённый от нормали на угол трения вектор сил  (его действие также учитывается на пятне контакта в сечении кольца).
(его действие также учитывается на пятне контакта в сечении кольца).
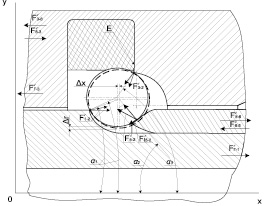
Рис. 4. Схема нагружения соединения в динамической стадии II этапа демонтажа (начальный период разжатия СЗК)
На динамической стадии II этапа демонтажа перемещения манжеты относительно раструба и особенности передачи осевого силового потока от трубы к трубе через демонтируемое соединение и МК обеспечивают высокую вероятность значительного изменения связей трубопровода с грунтом и усилий его натяжения в соединениях с соблюдением условий неравенства  . При этом выражение силового потока можно представить рядом
. При этом выражение силового потока можно представить рядом
 (20)
(20)
При выводе выражения (20) также использовались зависимости (16)–(17).
Динамическая стадия II этапа демонтажа характеризуется моментом прекращения соприкасаний СЗК по всей длине L дуги с кромкой радиусной выемки раструба и выталкиванием кольца в полость микропористой подкладки. При этом осевые составляющие  силового воздействия раструба на СЗК отсутствуют и не вызывают нарушения плоскостности его осевой линии.
силового воздействия раструба на СЗК отсутствуют и не вызывают нарушения плоскостности его осевой линии.
Учитывая незначительное силовое воздействие на СЗК микропористой подкладки, можно утверждать, что при дальнейшем разжатии кольца на него действует система сил со стороны РВ и только одной из двух деталей соединения:
а) до радиуса Rр1 – РВ и манжеты (рис. 5, а);
б) до радиуса Rр2 – РВ и поперечной стенки Е1 раструба (рис. 5, б).
В условиях изменения силы натяжения трубопровода  (или
(или  ) и возрастания суммарной движущей осевой силы
) и возрастания суммарной движущей осевой силы  динамика развития механических явлений при условно постоянном коэффициенте трения между кольцом и сопряжёнными деталями соединения может быть следующей.
динамика развития механических явлений при условно постоянном коэффициенте трения между кольцом и сопряжёнными деталями соединения может быть следующей.
При большой силе  натяжения трубопровода разжатие СЗК происходит при минимальном зазоре δ. С достижением радиуса разжатия Rр1 СЗК сечениями в точках А1 и Н опирается на манжету и РВ и под действием осевого усилия
натяжения трубопровода разжатие СЗК происходит при минимальном зазоре δ. С достижением радиуса разжатия Rр1 СЗК сечениями в точках А1 и Н опирается на манжету и РВ и под действием осевого усилия  сдвигается к стенке Е1 раструба к точке В1 (рис. 5, а).
сдвигается к стенке Е1 раструба к точке В1 (рис. 5, а).
С увеличением движущего осевого усилия  передняя кромка РВ упирается в радиусный выступ манжеты, инициируя под действием суммарного усилия
передняя кромка РВ упирается в радиусный выступ манжеты, инициируя под действием суммарного усилия  ее движение внутрь раструба. При этом СЗК с достижением радиуса разжатия Rр2 своими сечениями в точках А2 и К опирается на манжету и РВ и вместе с ними сдвигается до упора в поперечную стенку Е1 раструба в точке В2 (рис. 5, б). Манжета под действием силы
ее движение внутрь раструба. При этом СЗК с достижением радиуса разжатия Rр2 своими сечениями в точках А2 и К опирается на манжету и РВ и вместе с ними сдвигается до упора в поперечную стенку Е1 раструба в точке В2 (рис. 5, б). Манжета под действием силы  продолжает движение, ее контакт с СЗК в точке А2 прекращается и силовое взаимодействие переносится в точку В2. Для II этапа демонтажа изложенного понимания наиболее значимых механических явлений достаточно. Имея общее представление об их развитии, можно перейти к описанию III этапа демонтажа.
продолжает движение, ее контакт с СЗК в точке А2 прекращается и силовое взаимодействие переносится в точку В2. Для II этапа демонтажа изложенного понимания наиболее значимых механических явлений достаточно. Имея общее представление об их развитии, можно перейти к описанию III этапа демонтажа.
При достижении контакта торца манжеты с раструбом ее движение прекращается, а радиус разжатия СЗК достигает значения Rр3 (рис. 6). При этом разжатое СЗК закатывается на поверхность РВ, его контактные точки перемещаются в положение N на поверхности РВ и В3 на стенке Е1 раструба. С полным разжатием СЗК зафиксированная от продольного перемещения заведенными за буртик манжеты кулачками РВ готова к III этапу демонтажа.
а б
Рис. 5. Схема нагружения соединения при разжатии СЗК: а – до радиуса Rр1; б – до радиуса Rр2.
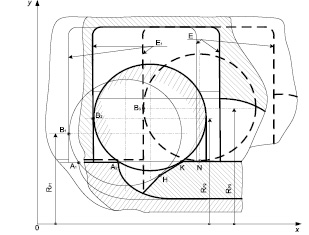
Рис. 6. Перемещение деталей соединения «Раструб» при его демонтаже (относительно условно неподвижной РВ)
Процесс демонтажа соединения труб завершается путем организации обратного хода рычага МК за счет его поворота до отказа в сторону раструба (заключительный – III этап демонтажа). При возвращении рычага МК в исходное положение зафиксированная кулачками РВ манжета начинает движение в заданном направлении. СЗК, упираясь в поперечную стенку Е1 раструба, попадает в пространство между точками А2 манжеты и К разъёмной втулки.
Накопленная ранее при разжатии СЗК потенциальная энергия расходуется в виде механической работы сил упругости при его перемещении с окружности RР3 на окружность RР2 и сопровождается ударом кольца по кромке выступа манжеты в точке А2. Этот удар монтажник слышит как щелчок. При дальнейшем извлечении манжеты из раструба СЗК под действием передающихся от поперечной стенки Е1 раструба сил, разжимаясь до радиуса RР3, занимает положение за кромкой радиусного выступа манжеты. Для преодоления возникающих при надвигании СЗК на кромку выступа манжеты сил трения в точке А2 монтажнику необходимо продолжить движение рычага МК в заданном направлении до полного извлечения манжеты и РВ из раструба.
Выявленные особенности динамики механических явлений на деталях соединения «Раструб» при его разборке разъёмным инструментом позволяют наиболее полно исследовать процесс демонтажа подвижного соединения труб.