



Целью проводимого исследования является повышение живучести мажоритарно-резервированных систем управления. Для достижения поставленной цели решается задача синтеза схемы мажоритарного элемента, сопоставимого по вероятности отказа узлов с мажоритарным резервированием с обычным постоянным резервированием.
В настоящее время одним из главных требований, которые предъявляются к автоматизированным системам, является их надежность.
Целью использования отказоустойчивых автоматизированных систем является сокращение производственных потерь. Чем выше расходы, связанные с остановом производства, тем более целесообразно использование отказоустойчивой системы.
Применение различных схем резервирования промышленных контроллеров позволяет значительно повысить надежность и отказоустойчивость систем. Практически все производители контроллеров предлагают готовые решения для повышения надежности системы, добавляя поддержку резервирования в изготовляемые контроллеры. При этом на практике применяются самые разнообразные схемы и варианты построения резервированных систем. Соответственно, существенно отличается и эффективность, достигаемая за счет применения резервирования.
Существующие варианты резервированных систем, построенных на промышленных контроллерах различных производителей, описаны в технической документации и упоминаются в ряде публикаций [1, 2, 3, 4].
Наиболее популярными вариантами построения резервированных систем являются решения с программной либо аппаратной поддержкой резервирования. При этом реализуются, как правило, дублированные или мажоритарно-резервированные структуры.
Опыт применения мажоритарно-резервированных систем, а также анализ работ, доступных в печати, позволяет сделать следующий вывод: мажоритарное резервирование достаточно просто конструктивно реализуется в цифровых устройствах и системах, но значительно уступает по повышению надежности резервированию без мажоритарного элемента. Это объясняется тем, что при обычном резервировании узел остается работоспособным до тех пор, пока не откажут все резервные элементы.
При мажоритарном резервировании отказ узла происходит уже в том случае, если отказали только (m + 1)/2 элементов из m, а остальные еще работоспособны (например, из 5 элементов 2 будут еще работоспособны). То есть в смысле использования возможности резерва мажоритарное резервирование далеко от оптимального.
Синтез схемы мажоритарного элемента
Сопоставим по надежности мажоритарное резервирование с обычным постоянным [5]. При сопоставлении в качестве показателей надежности используем вероятности отказа узлов с резервированием Qрм(t) и Qр(t). Сопоставление осуществим для случая, когда
m = 3, P(t) = e–λt.
Найдем вероятность безотказной работы узлов:
Pрм(t) = e–2λt(3 – 2e–λt);
Pр(t) = 1 – (1 – e–λt)3.
Принимая во внимание, что при λt << 1
e–λt ≈ 1 – λt;
Pрм(t) ≈ (1 – 2λt)(1 + 2λt) = 1 – 4λ2t2;
Pр(t) ≈ 1 – λ3t3,
получаем
Qрм(t) ≈ 4λ2t2;
Qр(t) ≈ λ3t3.
Отсюда следует, что
Qрм(t) >> Qр(t);

Поэтому для устранения этого недостатка для системы с тройным резервированием, структурная схема которой изображена на рис. 1, где ПУ – пункт управления, а КП0–КПN – контролируемые пункты системы, введем дополнительные режимы работы мажоритарных элементов, при этом получим:
1. Резервированный режим – мажоритарное голосование 2 из 3 при включенном режиме работы по трем входным величинам (2003).
2. Дублированный режим – голосование в режиме 1002 (по ИЛИ) и 2002 (по И) при включенном режиме работы по двум входным величинам.
3. Повторительный режим – голосование 1001,1002,1003 при включенном режиме работы по одной входной величине, в том числе – нерезервированный режим.
Для реализации этих режимов введем управляющие сигналы:
1) глобальных состояний пункта управления ГС-А , ГС-Б, ГС-В;
2) локальных состояний контролируемых пунктов ЛС-А, ЛС-Б, ЛС-В;
3) признаки резервирования ПР-А, ПР-Б, ПР-В, для функциональных частей ПУ и КП, которые означают необходимость обращения задатчика к функциональным частям соответствующих комплектов.
Причем первые и вторые могут быть реализованы как на программном уровне так и на аппаратном.
Признаки резервирования будем формировать только программно и хранить в регистрах состояния задатчиков (процессоров или контроллеров) различных уровней.
Введение признаков резервирования позволит обеспечить информационную безопасность системы и увеличит ее живучесть.

Рис. 1. Структурная схема системы управления
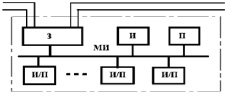
Рис. 2. Структурная схема комплекта
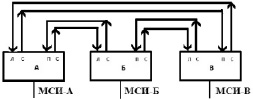
Рис. 3. Структурная схема системы комплексирования комплектов ПУ и КП
В ходе исследований предполагаем, что структурная схема комплекта ПУ или КП соответствует схеме, изображенной на рис. 2, где З – задатчик комплекта; МИ – магистраль интерфейса; И, П – источники и приемники информации соответственно.
На рис. 3 изображена схема системы комплексирования комплектов ПУ и КП, где А, Б, В это резервированные комплекты ПУ или КП; МСИ-А, МСИ-Б, МСИ-В это магистрали системных интерфейсов комплектов А, Б, В соответственно.
В качестве исходных данных для схем резервирования введем следующие обозначения:
1) С – сигнал своего комплекта;
2) Л – сигнал левого комплекта;
3) П – сигнал правого комплекта.
При этом для комплектов А, Б, В в качестве своего, левого и правого будут комплекты:
1) для комплекта А: свой – А, левый – В, правый – Б ;
2) для комплекта Б: свой – Б, левый – А, правый – В ;
3) для комплекта В: свой – В, левый – Б, правый – А ;
Система комплексирования ПУ-КП показана на рис. 4.
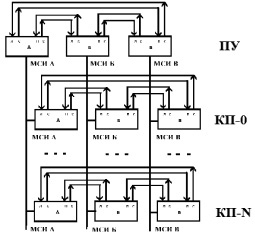
Рис. 4. Система комплексирования ПУ и КП
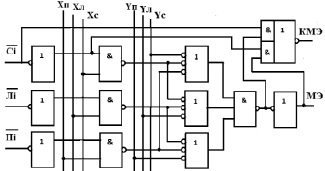
Рис. 5. Функциональная схема мажоритарного элемента
Для реализации дополнительных режимов работы мажоритарных элементов в ходе исследований синтезирована функциональная схема мажоритарного элемента, представленного на рис. 5.
Для управления мажоритарными элементами введены служебные сигналы Xс, Xл, Xп, Yс, Yл, Yп.
Сигналы Xс, Xл, Xп формируются из сигналов глобальных состояний пункта управления ГС-А, ГС-Б, ГС-В, локальных состояний контролируемых пунктов ЛС-А, ЛС-Б, ЛС-В, признаков резервирования ПР-А, ПР-Б, ПР-В соответственно. Сигналы Yс, Yл, Yп формируются из сигналов Xс, Xл, Xп, при этом Yс = XсVXп, Yл = XсV Xл, , Yп = XлV Xп.
Сигналы ГС-А, ГС-Б, ГС-В, ЛС-А, ЛС-Б, ЛС-В различных комплектов по межкомплектным связям доступны для всех комплектов и сигнализируют о безотказности того или иного комплекта даже при наличии неисправностей в отдельных функциональных частях комплектов.
Исследования проводились с целью резервирования сигналов системных интерфейсов для систем с магистрально-модульной организацией, при этом подразумевалось, что интерфейсы магистралей – широкие, т.е. многоразрядные.
На рис. 5 приведена схема мажоритарного элемента, на входы которого подаются сигналы своего, левого, правого одного разряда магистрали. На выходе мажоритарного элемента – МЭ, результат голосования сигналов различных комплектов с учетом сигналов управления по координатам X и Y, а также сигнал КМЭ – контроля мажоритарного элемента. Наличие активного состояния КМЭ на выходе мажоритарного элемента свидетельствует о несовпадении сигнала своего комплекта с мажоритарным сигналом – МЭ. Сигналы КМЭ могут фиксироваться в регистрах неисправностей контроллеров соответствующих комплектов. В дальнейшем анализ сигналов КМЭ различных разрядов магистрали позволяет судить о безотказности, неисправности или недостоверности в работе комплектов и системы управления в целом.
Это позволит системе диагностики комплектов и системы в целом в тестовом режиме принять решение о работоспособности аппаратных средств конкретных функциональных частей комплектов. В режиме диагностики можно изменять значение сигналов управления мажоритарных элементов, меняя значения сигналов глобального и локального состояния, а также признаки резервирования комплектов с целью перевода функциональных частей комплектов в режимы: мажоритарный, дублированный, повторительный. Статистические данные, накопленные в ходе диагностирования аппаратных средств в различных режимах, могут быть использованы для блокировки работы неисправных составных частей комплектов и системы в целом, что позволит повысить живучесть системы в целом.
Выводы
Показано, что повышение живучести мажоритарно-резервированной системы может быть обеспечено за счет применения схемы управляемого мажоритарного элемента, синтезированной в ходе проведенного исследования. Это позволит повысить безотказность мажоритарно-резервированных систем по сравнению с обычным постоянным резервированием.