



Описываемый аппарат относится к авиации, в частности, к пилотируемым летательным аппаратам вертикального взлета и посадки с возможностью зависания и предназначен для доставки рабочих бригад и грузов в труднодоступные низкотемпературные зоны размещения инфраструктуры ТЭК. Кроме того, аппарат может быть использован при проведении поисково-спасательных работ, для мониторинга территорий крупных промышленных предприятий и железнодорожных узлов, портов, трасс трубопроводов, линий электропередач. Он является дополнением в арсенале технических средств, предназначенных для работы в отдаленных и труднодоступных зонах хозяйствования.
Основные требования к транспортному средству
В числе основных проблем при создании такого летательного аппарата вертикального взлета и посадки отмечаются следующие:
• создание подъемно-маршевого комплекса и системы управления аппаратом, обеспечивающих гарантированную безопасность полета;
• обеспечение необходимой тяговооруженности и полноты её использования при минимальной массе и габаритах подъемно-маршевого комплекса;
• обеспечение максимально экономичных взлета, посадки и продолжительного полета;
• обеспечение возможности безаварийной посадки аппарата в случаях отказа агрегатов силовой установки;
• создание комфортных условий для полноценного функционирования экипажа, независимость его качества работы от внешних возмущающих факторов, бортовых источников низкочастотной вибрации, шума и т.д.;
• создание летательного аппарата с комфортными условиями для пассажиров, перевозимых в условиях низких температур, в полете, при промежуточных посадках и при наземном базировании в условиях непогоды.
Выбор аэродинамической компоновки аппарата
Если задаться взлетной массой аппарата 5000 кг, ометаемой площадью средств создания вертикальной тяги 20 м², то при рассмотрении ряда аэродинамических компоновок аппаратов вертикального взлета и посадки, соответствующих приведенным выше требованиям, выясняется следующее.
С точки зрения конструктивного оформления и практического применения наиболее интересной является компоновка летательного аппарата с вентиляторными подъемными движителями. Так, подъемный вентилятор СВВП XV-5A (1960 г.) при диаметре 1,59 м с приводом от ТРД тягой 1200 кг создавал вертикальную тягу 3163 кг, т.е. удельная тяга была равна 2,63 кг на единицу тяги маршевого ТРД.
В предлагаемой разработке привод вентиляторов осуществляется высокоэффективными электродвигателями, выполненными на основе редкоземельных магнитных систем. Электроэнергия для их работы вырабатывается генераторами, приводимыми во вращение специальными многотопливными высокоэкономичными двигателями, аналогичными ТВД чешского производства M-601F32 Walter.
При сравнительно небольшой нагрузке на ометаемую вентилятором площадь, которая равна 5000:20 = 250 кг/м², и нагрузке на эквивалентную мощность 5000:1400 = =3,6 кг/л.с. можно обеспечить приемлемые характеристики несущей системы на режиме висения. Аэродинамическая компоновка такого летательного аппарата может быть выполнена по схеме «летающая платформа».
Известными достоинствами «летающих платформ» являются:
• простота конструкции и дешевизна производства;
• малые габариты и защищенные винты, позволяющие совершать полеты над застроенными территориями, а также между верхушками деревьев в лесу (в целях маскировки);
• удобство в обслуживании и транспортировке;
• значительно больший, чем у вертолетов, ресурс агрегатов.
Как указывают фирмы, имеющие опыт проектирования и строительства «летающих платформ», по стоимости изготовления, простоте управления и эксплуатации «летающие платформы» вполне могут конкурировать с обыкновенными автомобилями, а по тактическим возможностям значительно превосходят их. Основным двигательным звеном машин этого типа является аэродинамическая система «воздушный винт в кольце» или «воздушный винт в туннеле».
Данная компоновка, кроме указанных выше достоинств, обеспечивает максимально комфортные условия для работы экипажа, изолируя его от широкого спектра шумов и колебаний, создаваемых силовыми установками с вентиляторами, и повышает безопасность взлета и посадки аппарата. Аппарат управляется одним членом экипажа с высокой степенью автоматизации процессов взлета, полета и выполнения посадки. Аппарат может брать на борт до 11 пассажиров с легким ручным багажом. При необходимости салон очень быстро трансформируется в салон для перевозки больных и раненых с необходимым оборудованием для поддержания их жизнедеятельности и оказания первой помощи.
Возможность использования аппарата для совершения вертикальной посадки и взлета в труднодоступных зонах оправдывается его выполнением по схеме «летающая платформа» с несколькими подъемными агрегатами в каналах и подъемно-маршевыми агрегатами в тяговых поворотных кольцах. Сама платформа выполнена в виде плоского крыла малого удлинения и способна создавать аэродинамическое торможение с выходом на большие углы атаки при переходе от горизонтального полета к заходу на посадку, в том числе на вертикальную.
Четное количество подъемных вентиляторов позволяет в случае необходимости, например, при отказе одного-двух из них, перейти на повышенный режим работы остальных вентиляторов и в дальнейшем произвести аварийную посадку без опасных эволюций и повреждений.
Графическое оформление проекта
Техническое решение поясняется чертежами, где:
на рис. 1 – вид аппарата сбоку в горизонтальной конфигурации полета;
на рис. 2 – вид аппарата сверху в горизонтальной конфигурации полета;
на рис. 3 – вид аппарата спереди в горизонтальной конфигурации полета;
на рис. 4 – вид аппарата сбоку в конфигурации вертикального взлета и посадки с выпущенными взлетно-посадочными устройствами, с разрезом по подъемным вентиляторам;
на рис. 5 – вид аппарата сверху в конфигурации вертикального взлета и посадки с движителем «воздушный винт в кольце», повернутым во взлетное положение;
на рис. 6 – вид аппарата спереди в конфигурации вертикального взлета и посадки с выпущенными взлетно-посадочными устройствами в момент касания земной поверхности.
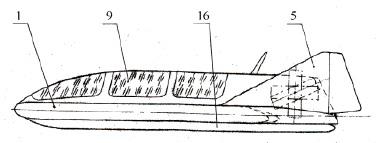
Рис. 1
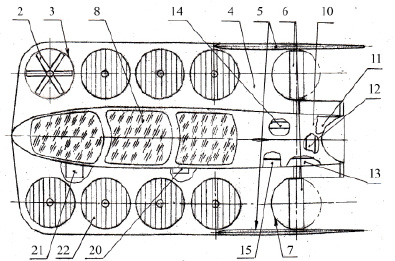
Рис. 2
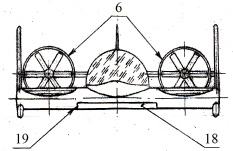
Рис. 3
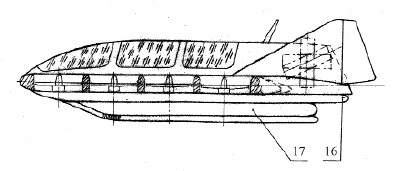
Рис. 4
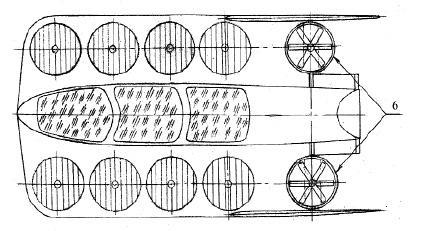
Рис. 5
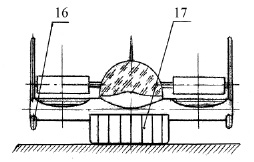
Рис. 6
Краткое описание проекта
Аппарат представляет собой платформу 1, на большей части которой по её длине размещены восемь подъемных вентиляторов 2, выполненных по аэродинамической схеме «воздушный винт в канале». Каналы 3 с вентиляторами 2 вмонтированы внутри конструкции платформы 1 по её длине двумя рядами по 4 шт. Хвостовая часть платформы 4 оснащена двумя плоскостями вертикального оперения 5. Между плоскостями 5 закреплены с возможностью поворота два подъемно-маршевых вентилятора 6. для беспрепятственного протекания потока воздуха, создаваемого вентиляторами 6 на переходных режимах полета аппарата, в хвостовой части платформы 1 имеется незамкнутый полукруглый вырез 7. Подъемно-маршевые вентиляторы 6 выполнены по схеме «воздушный винт в кольце». на верхней плоскости платформы по её длине между вентиляторами размещена кабина экипажа и пассажиров 8. Сверху кабина экипажа и пассажиров 8 закрыта открывающимся прозрачным фонарем 9 из ударопрочного пластика. Продолжением фонаря 9 в хвостовой части 4 является обтекатель 10, закрывающий силовую установку 11 с генераторами 12 и систему управления поворотом подъемно-маршевых вентиляторов 13. Кабина 8 оснащена системой кондиционирования 14, автоматически поддерживающей заданную температуру внутри её как в полете, так и длительно на земле. Наземное кондиционирование обеспечивается специальной экономичной вспомогательной силовой установкой 15.
Некоторые особенности взлетно-посадочных средств
Аппарат снабжен взлетно-посадочными устройствами в виде комбинации газонаполненного лыжного шасси 16 и адаптивного пневмоамортизатора 17.
Наличие комбинации газонаполненного лыжного шасси 16 с адаптивным пневмоамортизатором 17 позволяет аппарату выполнять безопасную посадку на неподготовленные площадки, в том числе на снег, лед, грунт, песок, водную и заболоченную поверхности без поломок.
В момент посадки при касании пневмоамортизатора 17 земной (водной) поверхности и дальнейшем его обжатии происходит демпфирование вертикальной скорости аппарата, превращение большей части его кинетической энергии в тепло, а также передача в виде распределенной нагрузки оставшейся части кинетической энергии на элементы конструкции платформы 1. Пневмоамортизатор 17 имеет достаточно большую площадью контакта с поверхностью земли, льда, снега, песка, заболоченной местности, что позволяет обеспечить мягкую посадку с малой вертикальной скоростью. Такой процесс обеспечивается по сигналам специальных датчиков, вмонтированных в нижнее основание пневмоамортизатора 17, и осуществляется подсистемой от бортового процессора, обеспечивающего подачу и регулирование давления воздуха в секциях пневмоамортизатора 17 дренажными клапанами. Нижнее основание 18 пневмоамортизатора под воздействием внешних нагрузок обладает способностью деформироваться, копируя поверхность, на которую опирается. Это обеспечивается заполнением секций пневмоамортизатора газообразной средой (например, воздухом) под разным давлением, когда секция над выступом земной поверхности имеет меньшее давление, чем секция над впадиной. Вся конструкция выполнена из композитных материалов типа кевлара, а нижняя поверхность 18 пневмоамортизатора покрыта антифрикционным составом (пленкой) на основе фторопласта.
Незадолго до полного обжатия пневмоамортизатора 17 в контакт с земной (водной) поверхностью вступает газонаполненное лыжное шасси 16, выполненное в виде надувной трубчатой конструкции с более жесткими параметрами демпфирования, чем пневмоамортизатор 17. Внешняя часть газонаполненного лыжного шасси 16 снабжена специальным покрытием, обеспечивающим скольжение при наличии составляющей горизонтальной скорости приземления аппарата, необходимой для перемещения аппарата по земле при выполнении некоторых операций в условиях его применения.
По завершении вертикального снижения и обжатия пневмоамортизатора 17, а также лыжного шасси 16 масса летательного аппарата полностью воспринимается лыжным шасси 16, что является сигналом для окончательной уборки пневмоамортизатора 17 в виде пакета в нишу 19 с её последующим закрытием нижним основанием 18 и постановкой на замки. Уборка пневмоамортизатора 17 осуществляется подсистемой управления пневмоамортизатором 20, исполнительными элементами которой являются специальные гофроцилиндры. Гофроцилиндры работают в режиме вакуумирования при уборке пневмоамортизатора 17 или в режиме нагнетания при выпуске его. Команды на выпуск пневмоамортизатора 17 или его уборку формируются бортовым процессором 21. После прекращения работы подъемных вентиляторов и их вращения, уборки пневмоамортизатора 17 аппарат, опирающийся на лыжное шасси 16, получает команду на закрытие восьми подъемных вентиляторов 2 специальными крышками типа «жалюзи», что позволяет защитить подъемные вентиляторы 2 от попадания посторонних предметов и от случайного воздействия на них людей. В таком виде аппарат способен находиться длительно при базировании на земле.
Пневмоамортизатор 17 вместе с газонаполненным лыжным шасси 16 придает аппарату плавучесть. Лыжное шасси 16 в этом случае работает в роли поплавков, обеспечивающих поперечную остойчивость аппарата на водной поверхности. Комбинация газонаполненного лыжного шасси 16 с адаптивным амортизатором 17 позволяет аппарату при нахождении его на плаву под действием силы тяги «воздушных винтов в кольцах» выходить на глиссирование на пневмоамортизаторе 17. Пневмоамортизатор 17 в этом случае создает необходимую гидродинамическую силу, обеспечивающую скольжение аппарата на водной поверхности.
Состав оборудования аппарата
В состав оборудования воздушного транспортного средства для работы в интересах ТЭК входят:
Пилотажно-навигационный комплекс с набором приборов и средств, обеспечивающим полеты аппарата днем и ночью, в простых и сложных метеоусловиях, в холодных зонах и зонах повышенных температур. В комплекс также входит миниатюрный встроенный приемоизмеритель ГЛОНАСС/GPS с функциями RAIM, FDE и P-RAIM.
Радиосвязное оборудование: приемник и передатчик УКВ-диапазона, аварийная радиостанция, радиокомпас, оборудование системы «Cospas-Sarsat», радиомаяки дальнего действия.
Система электроснабжения: генераторы, аккумуляторы, преобразователи, регуляторы напряжения, распределительные устройства, приборы контроля работы силовых установок.
Светотехническое оборудование: поисковый прожектор типа TSL-850, аэронавигационные огни, источник подсвета приборной доски, плафоны освещения кабины и багажного отделения, ручные переносные фонари.
Скоропомощные средства и оборудование: аптечки индивидуальные и коллективного пользования, переносные обогреватели.
Система управления аппаратом позволяет на вертикальных режимах полета эффективно управлять аппаратом относительно всех его осей.
Продольное управление осуществляется путем дифференциального изменения тяги пары передних подъемных вентиляторов и задних подъемно-маршевых вентиляторов. Поперечное управление – путем дифференциального изменения силы тяги боковых вентиляторов, расположенных слева и справа, а путевое – путем дифференциального изменения силы тяги накрест расположенных вентиляторов.
При переходе в конфигурацию горизонтального полета управление аппаратом автоматически приводится к следующему:
1. Продольное управление осуществляется путем дифференциального изменения тяги пары передних подъемных вентиляторов и пары задних подъемных вентиляторов. Подъемно-маршевые вентиляторы при этом выполняют свою основную функцию – создают горизонтальную тягу. Поперечное управление – путем дифференциального изменения силы тяги боковых вентиляторов, расположенных слева и справа.
2. Путевое управление при этом осуществляется дифференциальным изменением тяги подъемно-маршевых вентиляторов одновременно с поворотом рулей направления.
Стратегия управления аппаратом
Алгоритмы управления подъемными и подъемно-маршевыми вентиляторами совместно с автоматическим изменением режимов работы их приводов, рулей направления, уборка и выпуск взлетно-посадочных устройств аппарата формируются на основе универсальных базовых законов управления его пространственным движением с учетом особенностей компоновочной схемы данного летательного аппарата.
При таком подходе к построению системы управления в регуляторе формируется вектор управляющих воздействий с учетом всех переменных состояния системы, т.е. разбиение на отдельные контуры управления и построение изолированных следящих систем для каждого канала не производится. Последнее позволяет учесть динамические свойства математической модели летательного аппарата при аналитическом конструировании законов управления, что обеспечивает наибольшую адекватность системы управления физическому объекту.
Синергетические законы управления подъемными и подъемно-маршевыми вентиляторами совместно с автоматическим изменением режимов работы их приводов, рулей направления, уборка и выпуск взлетно-посадочных устройств аппарата обеспечивают в присутствии внешних возмущающих факторов координирующее управление с учетом естественных свойств летательного аппарата как нелинейного объекта механической природы. При этом будут достигаться поставленные цели управления – ведение аппарата по заданному маршруту (траектории полета) с контролем его положения по данным навигационной системы, а также обеспечение автоматического взлета, торможения, зависания, посадки и движения в глиссирующем режиме по водной поверхности. Кроме того, использование автопилота, в основу которого заложены синергетические законы управления пространственным движением, обеспечит автоматический вывод аппарата из предкритических режимов полета и предотвратит его попадание в критические режимы полета. В бортовой системе автоматического управления (БСАУ) аппаратом, кроме реализации синергетических алгоритмов управления пространственным движением, решается в том числе задача рационального использования электроэнергии, заключающаяся в её оптимальном распределении между бортовыми источниками питания и потребителями.
Данная стратегия управления имеет принципиальные отличия от традиционных систем автоматического управления полетом:
Разбиение на отдельные изолированные контуры управления для каждого канала не происходит, управляющие воздействия вычисляются совместно на основе универсальных синергетических алгоритмов пространственного движения с учетом информации обо всех переменных состояния системы. Таким образом, при вычислении вектора взаимосвязанных управляющих воздействий учитываются перекрестные связи между каналами управления, взаимное влияние которых на некоторых этапах полета может иметь большое значение.
Используемые универсальные синергетические алгоритмы пространственного движения получены в аналитическом виде без линеаризации математической модели, что позволяет наиболее адекватно описать процессы пространственного движения, а также не «привязывать» алгоритмы управления автопилота к конкретному объекту и его параметрам. Аэродинамические параметры и компоновочная схема данного ЛА задаются в виде специальных алгебраических уравнений связи, с помощью которых вычисляются непосредственно уставки для исполнительных органов и систем аппарата.
Взлет аппарата и переход в горизонтальный полет
При нахождении аппарата на поверхности земли перед его взлетом экипаж запускает силовую установку 11 с генераторами 12 и обеспечивает электроэнергией приводы вентиляторов и бортовое оборудование. Взлет аппарата, управляемый командами БСАУ, выполняется при работе восьми подъемных вентиляторов 2 и переведенных в горизонтальное положение двух подъемно-маршевых вентиляторов в кольцах 6. Все десять вращаемых электроприводами вентиляторов 2 и 6 отбрасывают воздушный поток вниз и обеспечивают тем самым отрыв аппарата от поверхности земли с последующим набором безопасной высоты. Аппарат зависает на некоторой высоте над местом старта. Повышая мощность подъемных вентиляторов 2, БСАУ дает команду на поворот подъемно-маршевых вентиляторов 6 для создания пропульсивной силы. Вектор тяги подъемно-маршевых вентиляторов 6 поворачивается из вертикального направления в горизонтальное. Под действием этого вектора тяги аппарат разгоняется в горизонтальном направлении.
Режим висения
При зависании аппарата он находится в состоянии устойчивого равновесия, обусловленного равенством сил и моментов, создаваемых подъемными 2 и подъемно-маршевыми вентиляторами 6, создающими вертикальную тягу, уравновешивающую его массу.
При наличии турбулентных возмущений, а также при отсутствии таковых, режим висения обеспечивается бортовой системой автоматизированного управления (БСАУ). Интенсивность турбулентных и иных возмущений, действующих на аппарат и превышающих его запас устойчивости, мгновенно вызывают адекватные изменения и распределения тяги, создаваемой вентиляторами. Данный процесс по показаниям датчиков обеспечивается БСАУ, которая выдает соответствующие координирующие сигналы исполнительным органам системы управления. Исполнительные органы управления создают силы и моменты противоположного направления действию возмущения, обеспечивая таким образом исходное равенство сил и моментов, действующих на аппарат.
Управление аппаратом по высоте обеспечивается изменением шага несущих винтов при соответствующем изменении мощности силовых установок по сигналам БСАУ.
Основные технические характеристики аппарата
Длина аппарата 12 м
Ширина 6 м
Диаметр вентиляторов 1,6 м
Количество вентиляторов во взлетной конфигурации 10 шт.
Мощность силовой установки 2× 700 л.с.
Масса топлива 400 кг.
Взлетная масса аппарата 5000 кг.
Крейсерская скорость 260 км/ч
Масса полезной нагрузки 1000 кг.