



К числу первых попыток создания летательного аппарата на солнечной энергии относится дистанционно пилотируемый летательный аппарат «Солярис», построенный в середине 60-х годов в Западной Европе конструктором Ф. Милитки. В октябре 1973 года в Австрии состоялся первый полет первого пилотируемого самолета на солнечной энергии с электродвигателем. Самолет был построен на основе мотопланера НВ-3. Самолеты на солнечной энергии разрабатывались и строились в Англии, ФРГ и США.
Результаты, привлекающие к себе внимание
Наибольших успехов в области проектирования и постройки аппаратов на солнечной энергии достиг американский конструктор П. Маккриди. Так, разработанный им самолет «Солар Челленджер» продемонстрировал возможности длительного полета с использованием только солнечной энергии. Самолет, имея классическую аэродинамическую схему при площади крыла 26 м2 и площади горизонтального оперения 9,3 м2, был оснащен 16 128 фотоэлементами, имел массу 156 кг. В декабре 1980 года самолет пролетел 24 км за 2 часа. В другом полете была достигнута высота 1070 м. После незначительной модернизации в середине мая 1981 г. самолет «Солар Челленджер» пролетел 305 км за 6 ч 38 мин и достиг высоты 3500 м. Во втором полете преодолел 307 км за 8 ч 19 мин и достиг высоты 4359 м. Такие обнадеживающие результаты привлекали все большее число энтузиастов к тематике создания самолета на солнечной энергии. На протяжении всех последующих лет и до настоящего времени проводились исследования, накапливался опыт, продолжали строиться и испытываться летательные аппараты, позволяющие делать смелые, технически обоснованные прогнозы на будущее коммерческое использование подобной техники.
По мнению специалистов, на основе уже накопленного опыта возможно создание беспилотного летательного аппарата, который с большой долей вероятности может стать альтернативой искусственным спутникам земли (ИСЗ) и пилотируемым самолетам для выполнения связных и разведывательных операций, картографирования, различных видов мониторинга в интересах метеорологических, экологических, природоохранных, сельскохозяйственных и т.д. структур. Эти летательные аппараты смогут обеспечить полеты с определенной частотой малой дальности или продолжительные полеты в намеченной зоне. Продолжительность полетов таких аппаратов ограничена только надежностью оборудования и их систем. Для сравнения: продолжительность полета пилотируемого самолета ограничена особенностями человеческого организма, а ИСЗ не всегда могут выполнить поставленные задачи по причине потери разрешающей способности при съемках с высокой орбиты или по причине прерывистого обзора в условиях полета на низкой орбите. Летательный аппарат с силовой установкой на солнечной энергии имеет уникальное преимущество осуществлять полет в течение многих месяцев на высоте свыше 15 000 м над большей частью поверхности Земли.
Проблемы, которые необходимо преодолеть
Обеспечение подобных летно-технических характеристик и продолжительности полета может быть осуществлено на основе внедрения комплекса новейших научно-технических достижений, в том числе прорывного характера. Аппарат подобного типа должен иметь высочайшее весовое совершенство, высокую эффективность работы силовой установки, в том числе иметь высокоэффективные системы и комплексы для преобразования и аккумулирования солнечной энергии. В нем должны быть использованы новейшие сверхлегкие конструкционные материалы и новые принципы их расчета на прочность. Аэродинамическая компоновка, аэродинамические профили, воздушные винты должны иметь оптимальные аэродинамические характеристики при их работе на малых числах Рейнольдса. При этом надо иметь в виду, что аэродинамика полета на малых числах Рейнольдса значительно отличается от классической аэродинамики.
Необходимо определить оптимальный состав полезной нагрузки, возможность включения в неё датчиков, работающих в ближних и далеких областях инфракрасного и ультрафиолетового спектров, состав оборудования для передачи данных в реальном масштабе времени. Обеспечение качества изображений, передаваемых с аппарата, должно быть более высоким, чем с ИСЗ, летающих на орбитах высотой 35 200 км.
При определении суточного баланса энергии для полета аппарата необходимо иметь избыток солнечной энергии, аккумулированной в полдень, которая должна быть достаточной для осуществления полета с крейсерской скоростью в ночное время без потери высоты. В этом случае можно говорить, что летательный аппарат находится в равновесном состоянии и осуществляет крейсерский полет при неизменной высоте.
Суточный баланс энергии для обеспечения полета аппарата в равновесном состоянии должен включать часть энергии, потребной для маневрирования и управления полетом, часть энергии для функционирования полезной нагрузки, обработки и передачи данных на землю.
Поскольку высота установившегося полета зависит от угловой высоты Солнца и продолжительности ночи, она может меняться для данного аппарата с полезной нагрузкой в зависимости от географической широты места и времени года. Это говорит о том, что если летательный аппарат такого типа точно удовлетворяет расчетным требованиям в дни начала и окончания выполнения намеченной программы, то он может быть способен функционировать и в других широтах на других высотах полета. Это имеет место потому, что если где-либо и когда-либо высота установившегося полета такого аппарата превысит расчетную высоту, требуемую для выполнения поставленной задачи, возникнет избыток солнечной энергии. Эта энергия может быть использована для маневрирования, повышения скорости или увеличения возможностей работы полезной нагрузки.
Применение научно-технических усовершенствований в аппаратах такого типа может обеспечить сокращение их габаритных параметров на довольно значительную величину. В свою очередь, эти факторы могут повысить противодействие таким явлениям аэроупругости как флаттер или закручивание крыла.
Истоки информации для исследований и проектирования
В конце 80-х один из авторов этих строк активно занимался патентным поиском по разделам «Авиация», «Летательные аппараты», знакомился с различными научно-техническими журналами, в которых все чаще попадались материалы об исследованиях, строительстве и полетах аппаратов на солнечной энергии. Эти материалы стали отбираться, систематизироваться, и на их основе начала умозрительно возникать концепция беспилотного летательного аппарата для экологического мониторинга (БЛАЭМ).
В 1995 году, учредив Городскую общественную организацию Благотворительное общество научно-технического творчества и экологии «Ювенал» города Таганрога (ОНТТЭ «Ювенал»), мы продолжили творческие изыскания без афиширования темы, так как «Самолет на солнечной энергии» вызывал улыбки специалистов-авиастроителей с причислением наших исследований к фантастике. К 1997 году были получены исходные данные для выбора аэродинамической компоновки, силовой установки, разработки конструкции планера аппарата, расчета летно-технических, энергетических и т.д. характеристик, определения возможностей и назначения БЛАЭМ.
Преодоление «инерции мышления» при разработке новой техники
В июне 1997 года по нашей просьбе было получено подтверждение Северо-Кавказского Гидрометцентра об актуальности и целесообразности проведения названных работ в интересах СК ГМЦ. С этим подтверждением и предварительными характеристиками БЛАЭМ мы обратились к Генеральному конструктору – Генеральному директору АООТ «ТАНТК им. Г.М. Бериева», заведующему кафедрой «Летательные аппараты» ТРТУ Г.С. Панатову с просьбой рассмотрения и утверждения темы дипломного проекта «Беспилотный летательный аппарат для экологического мониторинга» (БЛАЭМ). Тема была утверждена, назначены исполнитель – студент-дипломник, член ОНТТЭ «Ювенал» – и руководитель проекта – один из авторов этих строк. В результате многомесячной подготовки и выполнения дипломного проекта, который был реализован на уровне эскизного проекта, определен облик, разработаны чертежи и определены основные параметры БЛАЭМ. Защита проекта состоялась в апреле 1998 года с оценкой «отлично» в присутствии представителей Северо-Кавказского территориального управления по гидрометеорологии и мониторингу окружающей среды (СК УГМС). На проект было выдано Заключение СК УГМС о практической ценности и перспективности проведения работ в данном направлении (Приложение I, Приложение II).
В том же 1998 году проект БЛАЭМ стал участником Второго Всероссийского открытого конкурса дипломных проектов студентов по специальности «Проектирование авиационной техники» «Будущее авиации – 98», Генеральным спонсором которого была компания Boeing (США).
Проект БЛАЭМ в данном конкурсе занял первое место, исполнитель проекта, став Лауреатом конкурса, был награжден дипломом Министерства общего и профессионального образования Российской Федерации и денежной премией в размере 1000$ от компании Boeing.
К сожалению, интерес к данной тематике со стороны производителей авиационной техники в нашем регионе в течение последующих 15 лет даже в рамках НИОКР так и не возник, несмотря на то, что растет потребность использования таких средств в хозяйственном комплексе страны.
Общие сведения о БЛАЭМ
Беспилотный летательный аппарат для экологического мониторинга (БЛАЭМ) (рис. 1) выполнен по аэродинамической схеме составного крыла с круглым в плане центропланом, с прямым передним горизонтальным оперением, оснащенным элеронами для управления по крену, и стреловидным задним горизонтальным оперением с отогнутыми вверх поворотными консолями, обеспечивающими управление аппаратом по тангажу и курсу. Верхняя поверхность составного крыла покрыта фотоэлектрическими преобразователями (ФЭП) пленочного типа, преобразующими солнечное излучение в электрическую энергию. В качестве двигателей на аппарате применены 2 высокоэффективных электродвигателя постоянного тока со сдвоенными якорями на основе SmCo (самариево-кобальтовых) магнитов. Электродвигатели работают как попеременно в одиночном режиме, так и совместно. Движителем БЛАЭМ является двухлопастный воздушный винт изменяемого шага. Профиль лопастей винта Эпплер 193 обеспечивает КПД винта, равный 86 %. Получаемая в дневное время полета энергия обеспечивает питание электродвигателей, бортовой аппаратуры, исполнительных электромеханизмов и накапливается в электроаккумуляторах или супермаховике для дальнейшего обеспечения полета в малоосвещенное и темное время суток.
Конструкция БЛАЭМ полностью выполнена из композитов, преимущественно из органита 10Т, по балочно-лонжеронной схеме с обшивкой на основе мелкоячеистых сот из органита.
Традиционные взлетно-посадочные устройства (шасси) на аппарате отсутствуют.
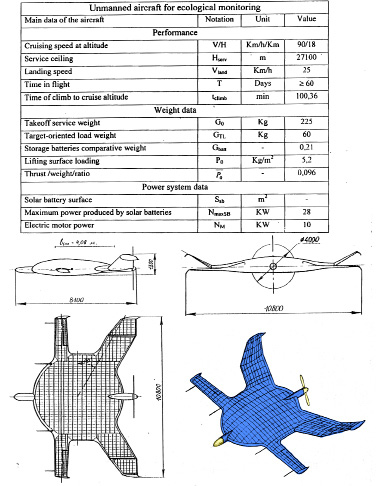
Рис. 1
Запуск БЛАЭМ осуществляется его подъемом посредством самолета-носителя (Бе-200) или аэростатическим летательным аппаратом на высоту ~ 3000 – 4000 м с последующей отцепкой от носителя и переходом в самостоятельный набор рабочей высоты.
Приземление аппарата производится на минимально возможной эволютивной скорости путем использования парашюта или на специальные сети-улавливатели.
Бортовое радиоэлектронное оборудование (БРЭО) состоит из бортового оборудования навигации, связи, управления, съема и передачи информации целевого назначения, управления энергетикой БЛАЭМ.
БЛАЭМ оснащен малогабаритной инерциальной навигационной системой, которая в себя включает:
1. Приемник сигналов спутниковой радионавигационной системы типа GPS;
2. Бесплатформенную инерциальную навигационную подсистему на основе:
• баровысотомера;
• микромеханических акселерометров;
• пьезогироскопов;
• трехосного магнитометра.
Комплексируя данные этих датчиков с данными приемника GPS, система вырабатывает полное навигационное решение по координатам и углам ориентации БЛАЭМ.
Информационно-логическим центром БРЭО и всего БЛАЭМ является бортовой процессор (БП). БП служит для сбора и обработки всей информации, доступной на борту БЛАЭМ. Результатом работы БП являются управляющие воздействия на исполнительные органы (сервоприводы) системы управления аппаратом и целевой нагрузки, команды электронному блоку управления и коммутации энергии, блоку управления двигателями-генераторами, а также телеметрическая, прежде всего, навигационная информация для передачи по каналам бортового приемо-передающего комплекса управления и контроля (ППКУК).
Управление БЛАЭМ осуществляется в 2-х режимах: ручном и автоматическом.
В обоих режимах управления аппаратом используется мобильный командный пункт (МКП). В ручном режиме управления и контроля оператор МКП ведет двухсторонний радиотелеметрический обмен информацией с бортовым приемо-передающим комплексом управления и контроля (ППКУК). Комплекс обеспечивает дешифровку и передачу команд на органы управления режимами полета БЛАЭМ и его пространственно-временное положение, а также обеспечивает контроль этих параметров. Одновременно оператор МКП получает с борта БЛАЭМ и анализирует текущую информацию о результатах наблюдения воздушной среды, земной и водной поверхности. При необходимости, к МКП могут быть подключены дополнительные ЭВМ для связи со специальными потребителями.
В автоматическом режиме управления полетом БЛАЭМ бортовой процессор (БП) обеспечивает выполнение полетного задания с возможностью его корректировки в зависимости от пространственно-временного положения летательного аппарата и окружающих метеоусловий. В этом режиме управления предусмотрена экстренная передача на Землю информации о внезапно произошедших экологических, техногенных катастрофах и пожарах с предоставлением экспресс-результатов их анализа в инфракрасном и ультрафиолетовом спектре оператору ППКУК.
При опасном приближении аппарата к границам зоны устойчивого обеспечения связи на землю подаются предупреждающие радиосигналы с одновременным уводом аппарата от границ этой зоны.
Назначение БЛАЭМ
Вести воздушный мониторинг (определять изменение химического состава атмосферы городов, промышленных районов, крупных лесных массивов);
Патрулировать обширные территории (определять наличие и состояние растительности, состояние поверхности почв, наличие влаги и др.);
Наблюдать подвижные и стационарные объекты;
Определять место и интенсивность пожаров, катастроф, природных катаклизмов, обеспечивая авиацию МЧС (самолеты-амфибии Бе-200) данной информацией.
Полезная нагрузка БЛАЭМ выполняет вышеобозначенные задачи на основе:
• получения телевизионного, тепловизионного, радиолокационного изображения местности и передачи его на командный пункт в реальном масштабе времени;
• сбора и обработки полетной информации;
• определения координат наземных объектов по указанию оператора.
Аппарат оснащен оптико-электронной системой на гиростабилизированной платформе.
Оптико-электронная система (ОЭС) оснащена автофокусировкой изображения и автоматической следящей системой, обеспечивающей захват и сопровождение подвижного объекта.
В состав полезной нагрузки БЛАЭМ входят также бортовые видеоспектрометры высокой разрешающей способности, работающие в ультрафиолетовой (УФ), видимой и инфракрасной (ИК) областях спектра.
Аппарат оснащен малогабаритной радиолокационной станцией (МРЛС) бокового обзора, предназначенной для получения радиолокационного изображения земной поверхности днем и ночью, в простых и сложных метеоусловиях.
Фотоэлектрическая силовая установка БЛАЭМ
Беспилотный летательный аппарат для экологического мониторинга (БЛАЭМ) оснащен фотоэлектрической силовой установкой (рис. 2), преобразующей солнечную энергию в электрическую, упрощенно состоящую из следующих элементов:
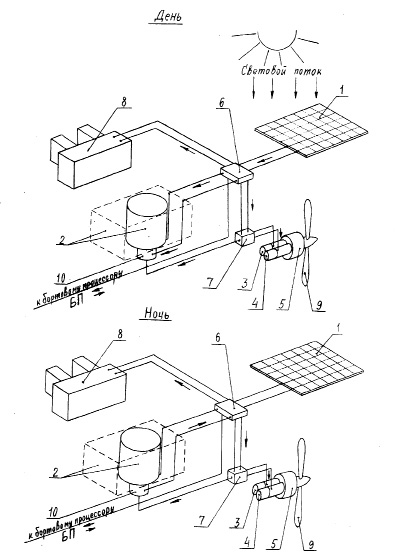
Рис. 2
1. пленочные ФЭП на несущих поверхностях ЛА;
2. блок аккумуляторов или маховичный накопитель энергии;
3. электродвигатель № 1;
4. электродвигатель № 2;
5. редуктор силовой установки с электромагнитными муфтами;
6. электронный блок управления и коммутации бортовой энергии;
7. блок управления электродвигателями № 1, № 2 и двигатель-генератором;
8. бортовые потребители электрической энергии;
9. воздушный винт изменяемого шага с горизонтальной укладкой лопастей;
10. двигатель-генератор для разгона маховичного накопителя энергии и съема с него электрической энергии в малоосвещенное время суток.
Часть энергии, преобразуемой пленочными ФЭП 1 в светлое время суток, через электронный блок управления и коммутации бортовой энергии 6 подается для накопления в блок аккумуляторов или запасается в маховичном накопителе энергии 2. Другая часть энергии через электронный блок управления и коммутации бортовой энергии 6 подается на блок управления электродвигателями и двигатель-генератором 7 и на один из электродвигателей № 1 или № 2. Третья часть энергии также через электронный блок управления и коммутации бортовой энергии 6 подается на питание бортовой аппаратуры и исполнительных механизмов (потребителей) 8 летательного аппарата.
В светлое время суток силовая установка БЛАЭМ, оборудование и целевая нагрузка питаются энергией, получаемой от ФЭП, расположенных на верхней поверхности составного крыла в соответствии с расчетом баланса энергии для обеспечения полета аппарата с условиями:
• БЛАЭМ совершает горизонтальный полет без ускорения;
• ввиду малой кривизны верхней поверхности профиля крыла принимается, что ФЭП расположены горизонтально;
• все бортовые потребители электроэнергии работают непрерывно с постоянным потреблением энергии.
По зарубежным данным тех лет, ФЭП, выполненные по пленочной технологии с легированием алюминием, могли повысить КПД до 27,5 %. Это позволяло на основании расчетных данных снимать свыше 20 кВт энергии с площади покрытия ФЭП составного крыла порядка 40 м2 при оптимальном угле падения солнечных лучей – 90 градусов.
В темное время суток силовая установка БЛАЭМ, оборудование и целевая нагрузка питаются энергией, запасенной в светлое время суток в аккумуляторах или в маховичном накопителе энергии. Конструктивно маховичный накопитель энергии представляет следующее. Два рабочих колеса противоположного вращения, имеющие нулевой реактивный момент, образуют супермаховик. Колеса выполнены путем намотки из углеволокна на синтетическом связующем, свободно подвешены в магнитных опорах герметичного корпуса, из которого удален воздух. Имея расчетную массу, колеса маховика раскручиваются до 40000 – 60000 об/мин. При этом они запасают механическую энергию, достаточную для обеспечения полета БЛАЭМ в малоосвещенное и темное время суток. В нижней части герметичного корпуса посредством электромагнитной муфты запасенная механическая энергия отбирается от вала супермаховика и подается на специальный двигатель-генератор 10, который работает в режиме генератора и преобразует механическую энергию в электрическую. Получаемая электрическая энергия направляется в электронный блок управления и коммутации бортовой энергии 6. Накопление энергии в супермаховике в дневное время суток происходит в обратном порядке. Специальный двигатель-генератор 10, работая в режиме электродвигателя, через электромагнитную муфту разгоняет супермаховик до расчетных оборотов.
Управление режимами потребления и преобразования энергии в любом из вариантов выполняет электронный блок управления и коммутации бортовой энергии 6 по командам БП в автоматическом режиме.
Конструктивно-силовая компоновка БЛАЭМ
Конструктивно-силовой набор составного крыла с круглым в плане центропланом изготавливается преимущественно из органита 10Т и имеет достаточно большую жесткость при малой массе. Конструктивно силовая схема (КСС) круглого в плане центроплана образована совмещением внутреннего силового набора с перегородками отсеков для полезной нагрузки. Все перегородки продольного (лонжероны) и поперечного (нервюры) набора круглого в плане центроплана выполнены по балочной схеме и имеют верхний и нижний пояс и стенку. Верхняя обшивка круглого в плане центроплана, представляющая собой мелкоячеистую сотовую конструкцию, изготавливается как единое целое с силовым набором.
После общей сборки БЛАЭМ на верхнюю обшивку наклеиваются пленочные фотоэлектрическими преобразователями (ФЭП) с присоединением их токоведущих шин к контактам, заформованным в верхней обшивке. Нижняя обшивка круглого в плане центроплана в местах размещения оборудования и полезной нагрузки представляет собой отдельные съемные панели (крышки люков), которые крепятся к поясам силового набора посредством быстросъемных заклепок.
На каждой из бортовых нервюр круглого в плане центроплана имеются 4 узла крепления для навески переднего горизонтального оперения (ПГО) и 4 узла крепления для навески заднего горизонтального оперения (ЗГО). Узлы изготовлены из титана ВТ-22 и заформованы в элементы лонжеронов при изготовлении конструктивно-силового набора круглого в плане центроплана.
В носовой части круглого в плане центроплана по оси симметрии установлена съемная носовая часть фюзеляжа, которая крепится посредством титанового крепежа к силовому набору центроплана. Носовая часть имеет разъемы для доступа к оборудованию, которое она закрывает.
ПГО выполнено по 2-лонжеронной схеме с нервюрами балочного типа из органита 10Т. Лонжероны выполнены по балочной схеме с заформованными при изготовлении узлами навески. Верхняя обшивка ПГО формуется совместно с силовым набором. Конструкция элеронов и их узлов навески – аналогичная.
ЗГО (заднее горизонтальное оперение), состоящее из неподвижной и поворотной (руля направления и высоты (РНВ)) частей, выполнено также по 2-х лонжеронной схеме. Лонжероны формуются совместно с нервюрами и верхней обшивкой. Так как между неподвижной и поворотной частями находится поворотный узел, требующий обслуживания, то нижняя панель выполнена съемной для доступа к узлу.
Хвостовой обтекатель имеет конструкцию, аналогичную носовой части фюзеляжа аппарата, имеет разъемы, позволяющие обслуживать электродвигатели и редуктор БЛАЭМ. Крепится хвостовой обтекатель к заднему лонжерону круглого в плане центроплана посредством титанового крепежа.
Все стыки агрегатов БЛАЭМ закрыты обтекаемыми зализами сложной формы, а несущие агрегаты снабжены аэродинамически совершенными законцовками.
Выводы
1. При получении в результате расчетов крейсерской скорости 90 км/ч на высоте 18 000 м., БЛАЭМ имеет возможность длительного наблюдения за одной локальной зоной.
2. Габариты и масса аппарата позволяют использовать в качестве его носителя самолет-амфибию Бе-200, взлетающую с сухопутных аэродромов.
3. БЛАЭМ имеет летно-технические характеристики, позволяющие включить его в систему совместной эксплуатации с самолетами-амфибиями Бе-200 для обеспечения их информацией о пожарах, экологических и техногенных катастрофах.
4. Спроектированный беспилотный летательный аппарат БЛАЭМ является экологически чистым.