



В некоторых областях современной промышленности необходимо применение механизмов, обеспечивающих полный оборот звеньев. Простейшими примерами таких механизмов являются шарнирный четырехзвенник [1, с. 33, рис. 2.1.] и кривошипно-ползунный механизм [1, с. 38, рис. 2.5.]. В первом случае, решив метрическую задачу и подобрав звенья определенной длины, можно, задав вращательное движение первому кривошипу, обеспечить полный оборот второго кривошипа (выходного звена). Во втором случае, выходным звеном может быть как кривошип, так и ползун. При использовании кривошипа в качестве выходного звена, движение задается ползуну. Примером такого использования механизма является двигатель внутреннего сгорания, где за счет энергии сгорания горючей смеси, поршню задается поступательное движение, преобразующееся посредством шатуна во вращательное движение коленвала (кривошипа).
Ниже показана кинематическая схема механизма (рисунок), полученная на основании теории синтеза структур [2, с. 41], которая может обеспечивать вращательное движение звеньев за счет использования подвижного линейного гидропривода.
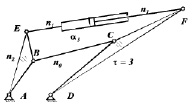
Полноповоротный плоский механизм с подвижным приводом
Полученная в работе [3] система уравнений (1), позволяет создавать схемы механизмов, задаваясь подвижностью W, сложностью базисного звена τ и числом звеньев ni.
 (1)
(1)
В этой системе pП и  – числа поступательных и вращательных кинематических пар в цепи, соответственно, n – число подвижных звеньев цепи, τ – наиболее сложное – базисное звено цепи, n0 – число звеньев, не добавляющих в цепь дополнительных кинематических пар, N – целое положительное число, γ – число ветвей цепи, δ – количество выходов и α – количество замкнутых изменяемых контуров.
– числа поступательных и вращательных кинематических пар в цепи, соответственно, n – число подвижных звеньев цепи, τ – наиболее сложное – базисное звено цепи, n0 – число звеньев, не добавляющих в цепь дополнительных кинематических пар, N – целое положительное число, γ – число ветвей цепи, δ – количество выходов и α – количество замкнутых изменяемых контуров.
Зададимся  ,
,  ,
,  и
и  , тогда из системы (1) получим
, тогда из системы (1) получим  ,
,  , pП =1 и
, pП =1 и  .
.
Параметр N в общем виде определяется формулой
 , (2)
, (2)
где ni – число звеньев, добавляющих в цепь по i кинематических пар.
С учетом полученного решения системы (1) и условием, что базисным звеном является трехпарное звено, т.е.  из уравнения (2) получаем, что
из уравнения (2) получаем, что  . Таким образом, в состав механизма будет входить одно звено n2, добавляющее две кинематические пары. Т.к. число выходов в механизме не может быть менее двух, следовательно, единственным решением, удовлетворяющим пятому уравнению системы (1), при g=3, может быть только одно: d=2 и α=1, т.е. в искомом механизме будет два выхода на стойку и один замкнутый изменяемый контур.
. Таким образом, в состав механизма будет входить одно звено n2, добавляющее две кинематические пары. Т.к. число выходов в механизме не может быть менее двух, следовательно, единственным решением, удовлетворяющим пятому уравнению системы (1), при g=3, может быть только одно: d=2 и α=1, т.е. в искомом механизме будет два выхода на стойку и один замкнутый изменяемый контур.
Полученное решение позволяет построить кинематическую схему полноповоротного плоского механизма с подвижным приводом. Решив метрическую задачу и определив необходимые длины звеньев, можно обеспечить полный проворот механизма.