



В статье «К вопросу о геометрии инверсора Поселье-Липкина» [1] была исследована зависимость величины хода прямолинейного движения шарнира равностороннего ромба, от длин шатуна ромба и трёх качающихся коромысел инверсора. В указанной статье было обращено внимание на то, что инверсор Поселье-Липкин не имеет в своём составе звена, которое могло бы делать полный оборот вокруг стойки и приводить механизм к непрерывному движению. Эта проблема может быть решена введением в состав механизма дополнительных звеньев. Наиболее удачным, по мнению автора, решением проблемы, является использование в составе механизма кулисной пары звеньев, включающих кривошип и ползун, входящий в поступательную кинематическую пару с одним из коромысел механизма.
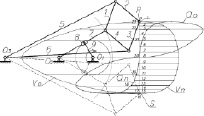 Механизм Поселье-Липкина с графиками скоростей и ускорений
Механизм Поселье-Липкина с графиками скоростей и ускорений
На рисунке показан механизм Поселье-Липкина с кулисным приводом. Он состоит из четырёх шатунов 1, 2, 3 и 4, соединённых через шарниры в подвижный ромб. Тремя шарнирами ромб соединяется с коромыслами 5, 6 и 7, при этом коромысла 5 и 6 соединяются между собой и со стойкой в шарнир, а коромысло 7 входит в поступательную кинематическую пару с ползуном 8, соединёным с кривошипом 9. При постоянном вращении кривошипа, коромысла и подвижный ромб механизма получают цикличное движение. При этом, точка R ромба будет совершать точное линейное, возвратнопоступательное движение.
Проведём кинематическое исследование описанного механизма. Построим механизм в 24 положениях кривошипа через равные углы в 15°. По линии движения точки R зафиксируем все 24 её положения. Движение точки R вниз назовём прямым ходом S. Он фиксируется положением от нулевого до 16-го, обратное движение фексируется точками 16 до 24.
Величины скоростей – V и ускорений – α точки R, полученные методом кинематических диаграмм, откладываются на рисунке-1 перпендикулярно направлению её движения в соответствующих масштабах µs, µs, µα.
При рассмотреном способе задания регулярного движения механизма Поселье-Липкина, можно достичь не только точно линейного движения точки R, но и квазипостоянной её скорости на определённом участке.