



В работе [1] авторами был проведен кинематический анализ роликового кантователя прокатного стана для режима захвата заготовки. Обратимся к решению задачи о кинематике роликового кантователя прокатного стана в режиме кантовки заготовки (рис. 1, а), когда в качестве рабочего используется гидроцилиндр 1-2.
Зафиксируем поршень 2 в верхнем положении относительно гидроцилиндра 1 и, перемещая поршень 2 вниз на равные смещения, построим пять положений механизма (рис. 1, б).
а б
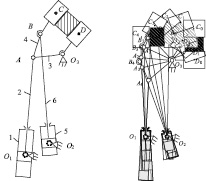
Рис. 1 Схема роликового кантователя прокатного стана (а) и построение положений механизма для режима кантовки заготовки (б)
Из анализа рис. 1,б видно, что гидроцилиндр 5-6 активно не участвуя в работе кантователя, совершает вынужденное поступательное движение поршня 6 относительно гидроцилиндра 5, а также вращательное движение гидроцилиндра 5 относительно стойки О2.
Используя построенный план положений роликового кантователя, можно определить зависимость изменения углов φ3 и φ4 от перемещения s поршня гидроцилиндра 1-2 (таблица) и построить диаграмму положений механизма (рис. 2).
Таблица
Зависимость изменения углов φ3 и φ4 от перемещения s поршня гидроцилиндра 1-2
|
s, мм |
0 |
95 |
190 |
285 |
380 |
|
φ3, φ4, ° |
0 |
20 |
40 |
60 |
90 |
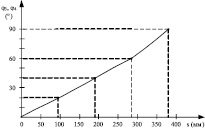
Рис. 2 Диаграмма положений роликового кантователя прокатного стана
На диаграмме видно, что зависимость изменения углов φ3 и φ4 от перемещения s поршня гидроцилиндра 1-2 носит линейный характер.