



Развитие авиации, большие концентрации воздушных судов на отдельных, относительно небольших участках территорий, особенно в зонах крупных аэродромов, стремление к большим скоростям на максимально облегченных конструкциях летательных аппаратов объективно привели к возникновению конфликта между техническим прогрессом и природными явлениями. Среди них, важнейшим является конфликт летательных аппаратов с птицами, с которыми всё чаще сталкиваются самолёты (Ganja и др., 1991). По данным (Leshem and Yom-Tov, 1998) над территорией Израиля проходят основные пути миграции птиц из Европы, а также, частично, из ряда районов Азии в Африку и обратно. Исследования (Bruderer, 1992) показали, что в период миграции в зонах и на высотах массового перелёта в каждом квадратном километре воздуха здесь число птиц в среднем достигает 500 особей и более. Большая насыщенность воздушного пространства Страны различными летательными средствами и мощная межконтинентальная весенне-осенняя миграция птиц нередко приводят здесь к авиационным катастрофам, результатами которых становится не только гибель птиц, но и человеческие жертвы. (Bahat and Ovadia, 2005). Нередки авиационные катастрофы из-за столкновния самолётов с птицами и в других регионах мира (Thorpe, 2005). Все это требует создания оперативных технических средств оценки и контроля орнитологической обстановки для обеспечения безопасности полётов самолётов.
Основная идея построения алгоритма
В табл. 1, 1(а) приведены характерные особенности радиоэхо перелётных птиц.
Величина ЭПР одной и той же птицы может меняться на фактор 10, в зависимости от её ориентации относительно направления на радар (Houghton, 1964; Bruderer and Joss, 1969). По данным (Завируха, Степаненко, 1978), выполнявшим измерения ЭПР птиц под различными углами относительно диаграммы излучателя в безэховой камере, максимум эхо-сигнала находился между 65 и 115 градусами относительно направления облучения, что соответствует боковой поверхности птицы (0° соответствует направлению диаграммы излучателя на клюв птицы). Кроме того, вариации ЭПР могут вызываться взмахами крыльев птицы. В этих случаях значение ЭПР увеличивается в 10 раз относительно среднего или уменьшается почти до нуля. Частота таких колебаний составляет 2–24 Гц (Chernikov, 1979). Таким образом, ЭПР птицы зависит от ее размеров, ориентации по отношению к направлению на радар и от мгновенного положения двигающихся крыльев. В процессе настоящего исследования получен ряд дополнительных, характерных для радиоэхо птиц, признаков.
Таблица 1
Характерные особенности радиоэхо перелётных птиц
|
Характерные особенности радиоэхо |
Исследователи* |
|
– относительно низкая мощность. Коэффициент отражаемости (Z < 30 dBZ); – поступательное и относительно прямолинейное движение; – максимальные амплитудные флюктуации находятся в области низких частот (до10dB в частотном диапазоне 2–50 Hz); – измеренные с помощью МРЛ-5 s на длине волны 10 см больше чем на длине волны 3 см; – поляризационные характеристики сигнала характерны для горизонтально ориентированных целей. Дифференциальная отражаемость, как отношение горизонтально ориентированного отражённого сигнала (при горизонтально поляризованном излучённом сигнале) к вертикально ориентированному сигналу (при вертикально поляризованном излучённом сигнале), существенно превышает единицу (dP = P׀׀/P┴ >> 1). Для мелких капель облаков и осадков она близка к единице; – в диапазоне длин волн l от 3 до 100 см s птиц и насекомых заметно уменьшаются с увеличением длины волны радиолокатора. В то же время в частотной зависимости s(l) птиц имеется хорошо выраженный максимум на длине волны l = 10 см; – большая дисперсия экспериментальных значений s птиц при l = const (от нескольких десятков квадратных сантиметров на l = 3 см; до s = 10–1 см2 на l = 100 см). Характерные значения s для некоторых видов птиц со сложенными крыльми приведены в табл. 3(а); – The mean s values of different bird spices at the value of radar wavelength less then 10 cm от 15 см2 (Sparrow) до 400 см2 (Albatross); – значения s птиц примерно на 2–3 порядка больше s насекомых |
Edwards, Houghton, 1959; Salman, Brilev, 1961; Schaefer, 1966; Chernikov and Schupjatsky, 1967; Skolnik. 1970; Chernikov, 1979; Bruderer and Joss, 1969; Bruderer, 1992; Ganja et al. 1991; Buurma, 1999; Larkin et al., 2002; Gudmundsson et al., 2002; Gauthreaux and Belser, 2003; Zavirucha et al., 1977; .Zrnic, and Ryzhkov, 1998. |
Примечания: * – число исследователей характерных особенностей радиоэхо от птиц значительно больше, чем указано в настоящей таблице. ** – s – эффективная площадь рассеяния.
Таблица 1 (а)
Величины σ разных видов птиц со сложенными крыльями при различной ориентацииих тела в направлении на радиолокатор
|
Вид птицы |
Величина σ м2 при облучении птицы с разных сторон |
||
|
Бок |
Голова |
Хвост |
|
|
Грач |
2,5·10–2 |
– |
– |
|
Голубь |
1,0·10–2 |
1,1·10–4 |
1,0·10–4 |
|
Скворец |
2,5·10–3 |
1,8·10–4 |
1,3·10–4 |
|
Домовый воробей |
7,0·10–4 |
2,5·10–5 |
1,8·10–5 |
На рис. 1 поле радиоэхо после аналого цифровой обработки сигналов 18 обзоров. Этот рисунок позволяет увидеть точечную структуру полос радиоэхо. Анализ этих рисунков показывает, что одним из основных признаков радиоэхо птиц является его движение, в результате которого точечные радиоэхо преобразуются в полосы. При изучении этих полос и увеличенных фрагментов (1, 2, 3, 4) обращает на себя внимание их относительная прямолинейность. Наращивание длины полосы происходит за счёт поступательного движения радиоэхо во времени. Специально разработанная аналитическая программа позволила проанализировать структуру 270, отобранных по принципу случайности, полос радиоэхо. Во всех случаях экспериментальные полосы радиоэхо получены путём формирования суммарных файлов по 8 обзорам на одном фиксированном вертикальном угле антенны. Программа даёт возможность проследить процесс формирования полос по времени от обзора к обзору. Полученные результаты показали, что повторяемость радиоэхо от птиц в одной и тоже координтатной точке за период 8 обзоров (80 с) не менее чем в 90 % случаев не превышает двух раз. Этот результат определяется, как характером движения птиц, так и техническими параметрами системы, т.е. короткими импульсами и узкой, симметричной диаграммой направленности антенны. Иначе обстоят дела с повторяемостью в одной и той же координатной точке сигналов отражённых от местных предметов, облаков и некоторых видов атмосферных неоднородностей. Радиоэхо от этих целей, как правило, повторяются на всех или в большинстве обзоров и, вследствие этого, легко отфильтровываются. Исключение составляют сильно флюктуирующие слабые сигналы, отражённые от рыхлых облаков и осадков. Относительно большая концентрация такого рода «мигающих сигналов» создаёт иллюзию изменчивости их пространственного положения и воспринимается, как движение. Однако, в силу выше указанной природы происхождения и поведения, характерным признаком таких отражателей является хаотичный характер направления псевдодвижения рядом расположенных радиоэхо. Вследствие этого, образованные таким путём вектора, в отличие от векторов мигрирующих птиц, будут иметь хаотичную направленность.

Рис. 1. Поле радиоэхо после аналого цифровой обработки сигналов 18 обзоров:1, 2, 3, 4 – увеличенные фрагменты соответствующих участков этого поля
Детальное описание методики селекции сигналов от птиц на фоне всех атмосферных радиоэхо, а также расчёт и построние орнитологических карт изложены на русском языке в (Диневич, Лешем, 2008) и на английском языке в (Dinevich, Leshem, 2007, 2010, 2011). Примеры нескольких типов орнитологической карты, построенной на основе разработанного алгоритма представлен на рис. 2–7. На рис. 8 карта радиоэхо облачности. На рис. 9 – внешний вид радиолокатора и школьники после занятий по радиолокационной орнитологии. На рис. 10 в индикаторной кабине радиолокационного орнитологического комплекса.
Некоторые перспективы развития и повышения надёжности системы
1. Отношение мощностей радиоэхо на двух длинах волн
Отношение мощностей радиоэхо на двух длинах волн в МРЛ-5 зависит только от свойств цели (Abshaev et al., 1980). В работе (Chernikov, 1979) показано, что мощность радиоэхо от насекомых больше на длине волны 3см, чем на длине волны 10 см. Для птиц это отношение обратное. То же соотношение справедливо для мощностей радиоэхо от мелкокапельных облаков и осадков (Stepanenko, 1973). Таким образом, отношение коэффициентов отражения на двух длинах волн (ZdBZ3,2sm/ZdBZ10sm > 1 – не птицы) может служить дополнительным признаком селекции сигналов от птиц и устранения ложных векторов.
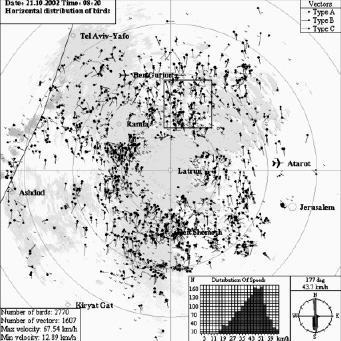
Рис. 2. Оринитологическая карта миграции птиц 21 октября 2002 года в 8.20 утра. Вектора, показывающие направления и скорости перелётов, – одиночные и группы птиц. Три типа векторов (хорошо видны на цветных картах) – Слабо выраженные серым цветом отражения – холмы и облака. На цветных картах они хорошо выделяются различными цветами, в том числе облака голубым цветом. А – увеличенный фрагмент карты, на котором видны три типа векторов, отличающиеся друг от друга по характеру движения различных видов птиц. Такого типа карты, а так же карты распределения векторов по высотным слоям и объёмного распределения птиц в периоды их сезонной миграции направляются по электронной связи в службу управления движением самолётов каждые 15–20 мин
2. Поляризационные характеристики радиоэхо
В работах (Shupijatcky, 1959) показано, что величины деполяризаци и дифференциальной поляризации функционально связаны только с формой цели и её ориентацией в пространстве и не зависят ни от каких других параметров, в том числе диэлектрической проницаемости цели, ослабления сигнала на трассе и т.д. Используя две поляризационные компоненты ∆Px и dP, можно вычислить ориентацию птиц в пространстве и их форму, т.е. отношение длины к ширине. Формула для расчёта угла ориентации птицы в пространстве имеет следующий вид tg2θ = 2∙dP½ΔP½ [dP½ – 1]. Здесь θ – угол ориентации птицы в пространстве. Не мало важной является возможность по величине дифференциальной отражаемости выделять сигналы от птиц на фоне отражений от различных атмосферных неоднородностей, природа которых не связана с образованием видимых гидрометеоров. Дифференциальная отражаемость от таких неоднородностей близка к 1. Дифференциальная отражаемость от птиц на много больше единицы. Это означает, что указанный признак отражённого сигнала может быть использован при фильтрации сигналов от такого типа атмосферных неоднородностей. В работе (Dinevich и др., 1994) также показано, что дифференциальная отражаемость от мелкокапельных облаков приближается к единице. Исходя из этого, сигналы с параметрами ≤ 30∙dBZ и dP ≈ 1 характерны для отражений от мелких капель, а сигналы с параметрами ≤ 30∙dBZ и dP >> 1, в дополнении с другими их особенностями (характеристики флюктуации, подвижность в пространстве и т.д.), могут принадлежать птицам.
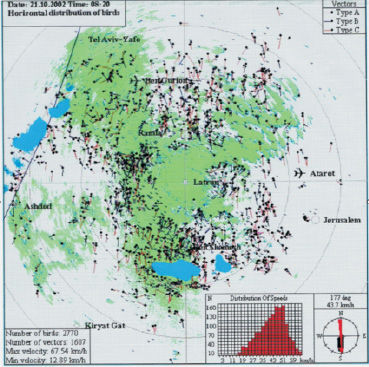
Рис. 3. Карта орнитологическая за 21.10.2002 год в 08.20 утра. Вектора радиоэхо птиц совмещены с картой холмов и облачности
3. Флюктуационные характеристики радиоэхо от различных отражателей
На основе наших исследований флюктуационных характеристик сигналов от различных отражателей (Dinevich et al., 2004) было собрано специальное устройство. Оно позволяет в режиме остановленной антенны в заданном стробе длиной 200 м в каждом отражённом зондирующем импульсе выделять максимальный по амплитуде сигнал, запоминать его, накапливать и строить амплитудные и частотные спектры по 10–20 секундным их выборкам. Учитывая повторяемость зондирующих импульсов в МРЛ-5 (500 имп. в с), в каждой выборке формируются спектры изменения мощности и частоты повторения максимумов 5–10-и тысяч сигналов. Специально настроенный низкочастотный фильтр позволил с точностью не менее 80 % разделить спектры амплитудной флуктуации сигнала на два вида «птица» или «не птица». В тех случаях, когда сигнал формируется одной птицей, достоверность способа распознавания цели превышает 95 %.
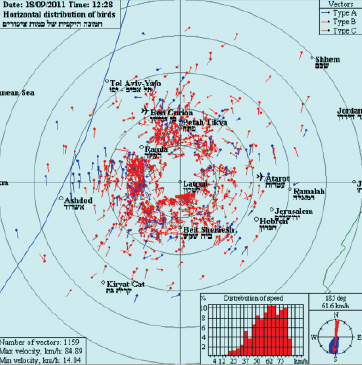
Рис. 4. Карта орнитологической обстановки 18.09.2011 года в 12 часов 28 мин. Синий цвет векторов принадлежит птицам, летящим прямолинейно и с постоянной скоростью, коричневый – птицам, летящим с небольшим изменением скорости, но с постоянным направлением и красный – птицам с изменяющимися направлениями и скорости
Заключение
– Найденные для различных целей признаки радиолокационных сигналов и разработанный на их основе алгоритм позволяет распознавать радиоэхо от птиц и в оперативном масштабе времени строить векторные поля их движения, в том числе по высотам.
– Способ построения векторных полей позволяет разделять птиц по характеру их движения на несколько категорий, в том числе птицы часто меняющие направление движения (местные), летящие прямолинейно и с постоянной скоростью, прямолинейно, но с переменной скоростью, с отклонением от прямолинейного движения и с переменной скоростью.
– Построенные на основе разработанных алгоритмов радиолокационные орнитологические карты содержат в масштабе до 60 км относительно места размещения радиолокатора следующую информацию:
- общее количество птиц;
- распределение их по высотам;
- спектр скоростей и направлений полёта, в том числе вектор суммарного направления;
- векторные поля движения птиц на фоне метеорологической обстановки и с привязкой к местности;
- распределение видов птиц по характеру их движения (степени прямолинейности и равномерности);
- об облаках, осадках, невидимых визуально атмосферных образованиях и их параметрах.